MWORKS全民体验官计划第一期——Sysblock建模挑战
5月15日,MWORKS 2025a SP2 已正式发布包括,在此版本中完成了多项功能升级与优化。新增11个基础框图模块;新增封装模型和子系统、隐藏内部逻辑并简化参数配(MASK功能);支持Syslab与Sysplorer/Sysblock的数据工作区无缝交互;新增内置常量,状态及动作及条件的直接赋值输入;支持Sysblock模型fmu导出完整端口识别......
为帮助大家快速上手新版功能,提升实际应用效果,也为了倾听更多来自用户的声音,我们正式发起——

活动时间
作品投稿: 即日起至2025年6月3日
内容评审: 2025年6月4日—6日
Sysblock 建模挑战
题目简介
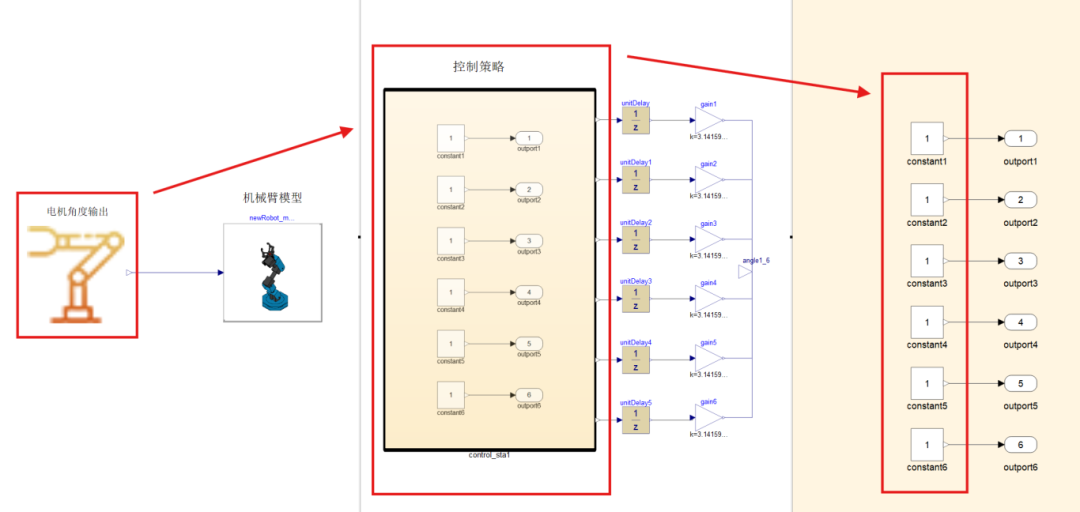
📑题目一:机械臂控制系统设计
使用Sysplorer 2025a SP2集成的框图建模环境 Sysblock 完成“机械臂控制系统设计”,修改电机角度输入中的控制策略模型(control_sta)并集成至顶层控制模型(top_model)。在7秒内将小球移动到[0.2,0,0.2] 位置,实现对给定简单机械臂物理模型(Sysplorer模型)的精准位置控制与轨迹跟踪,最终得出第10秒的小球与目标距离之间的大小。
✨ 加分项
- 模型中增加机械臂的轨迹跟踪控制并给出设计说明
- 优化机械臂启停策略,使得小球在落到桌面前质心加速度不大于[100m/s2]
- 自行推导机械臂运动学逆解,集成到控制模型中
- 除题目要求的方式外,额外使用Sysplorer/Syslab进行控制系统建模
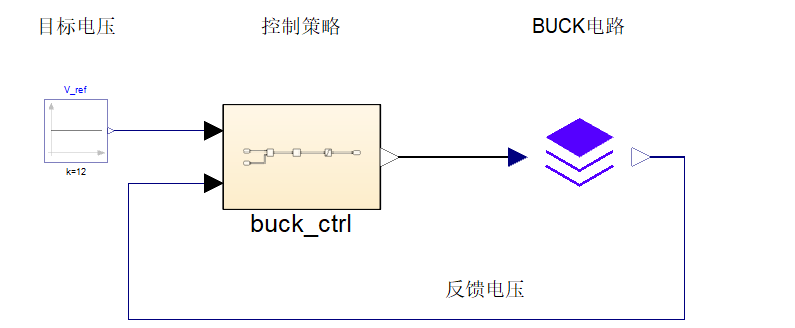
📑题目二:BUCK电路控制系统设计
使用Sysplorer 2025a SP2集成的框图建模环境Sysblock,参考附件中BUCK电路控制模型库的顶层混合模型(top_model)模型,进行BUCK电路控制系统(Buck_ctrl)设计,实现对给定BUCK电路模型(SynchronousBuck_new)的电压稳定控制。
解题参考方式(不限于以下):
- 使用Sysblock中基础元模型搭建控制策略模型
- 使用Sysblock中CCaller组件集成外部C代码进行控制系统
- 建模使用Sysblock中C_Function组件编写控制策略
✨ 加分项 - 使用2种以上解题方式(含2种)实现BUCK电路控制系统设计
- 系统模型中增加功率控制环路
- 控制效果满足反馈电压超调量不超过2%
- 控制效果满足输出电压稳态纹波不超过1%
挑战题目及案例文件下载 - 本帖附件下载
- 百度网盘链接
https://pan.baidu.com/s/1NSIM6ZEuxABVSBo1HKMNgQ?pwd=tyrk
投稿参与方式
1、作品形式
🔹图文文章:阐述作品实现思路、展示关键模型、讲解模型,并展示运行结果。
🔹演示视频:讲解模型实现思路、展示关键模型,完成在线运行与结果展示。时长不超过10分钟。
-以上形式供参考,欢迎使用其他形式投稿
2、内容发布(需同时完成以下两项)
🔹MoHub平台「技术交流」专区,添加标签#MWORKS体验官#
🔹任一社交平台(知乎 / CSDN / B站 / 小红书 / 抖音),添加话题标签#MWORKS体验官#并@同元软控官方账号
3、为确保统计有效,请在完成内容发布后,填写投稿信息登记表 扫描二维码填写上传

奖励评分
评分标准
结果正确性:模型结果准确,完成质量高,功能实现符合预期;
逻辑完整性:解题思路清晰合理,理论推导严谨,模型实现过程与逻辑一致;
模型严谨性:模型结构科学,能真实反映系统行为,仿真结果合理可靠;
传播力:具备一定的阅读量、点赞评论或互动数据(仅作辅助参考);命题各自的加分项。
注:若同时参与两道题,每道作品将分别参与评审与奖励评定,不累计加分。
奖品一览
| 奖项名称 | 奖励内容 | 名额 |
|---|---|---|
| 金牌体验官 | 价值500元 | 1名 |
| 星耀体验官 | 价值300元 | 2名 |
| 优秀体验官 | 价值200元 | 3名 |
温馨提示:
①内容刷赞、刷阅读量等行为将直接取消获奖资格;
②最终符合标准的内容不满足当前奖项设定名额,将按照实际获奖用户发放;
③在法律许可的范围内MoHub社区拥有本活动的最终解释权。
问题交流
- License申请官网提前申请权限,如遇无法申请等问题,请联系18115503283
- 技术交流
① MoHub:点击进入“技术交流专区",🔗https://mohub.net/bbs/pubtechx
② 公众号:在“同元软控”公众号留言
 1 个附件(2144kb)
1 个附件(2144kb) '%3e%3cg%20id='Group'%3e%3cpath%20id='Vector'%20d='M12%2012.0002C13.933%2012.0002%2015.5%2010.4331%2015.5%208.50009C15.5%206.56705%2013.933%205%2012%205C10.067%205%208.5%206.56705%208.5%208.50009C8.5%2010.4331%2010.067%2012.0002%2012%2012.0002Z'%20fill='white'%20stroke='white'%20stroke-width='1.40002'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M19.5%2021.6877C19.5%2019.6985%2018.7098%2017.7908%2017.3033%2016.3843C15.8968%2014.9777%2013.9891%2014.1875%2012%2014.1875C10.0109%2014.1875%208.10322%2014.9777%206.6967%2016.3843C5.29018%2017.7908%204.5%2019.6985%204.5%2021.6877'%20stroke='white'%20stroke-width='1.87503'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M12%2014.1875C10.0109%2014.1875%208.10322%2014.9777%206.6967%2016.3843C5.29018%2017.7908%204.5%2019.6985%204.5%2021.6877H19.5C19.5%2019.6985%2018.7098%2017.7908%2017.3033%2016.3843C15.8968%2014.9777%2013.9891%2014.1875%2012%2014.1875Z'%20fill='white'%20stroke='white'%20stroke-width='1.87503'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3crect%20x='2.15'%20y='2.15'%20width='19.7'%20height='19.7'%20rx='9.85'%20stroke='%23F96A02'%20stroke-width='0.3'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_474_37108'%3e%3crect%20x='2'%20y='2'%20width='20'%20height='20'%20rx='10'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e)
'%3e%3cg%20id='Group%201882'%3e%3cg%20id='Group%201881'%3e%3cpath%20id='Vector'%20d='M16.3334%202.02441H1.66675V14.5244H6.91675L9.00008%2016.6077L11.0834%2014.5244H16.3334V2.02441Z'%20stroke='white'%20stroke-width='1.25'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3cpath%20id='&%23239;&%23188;&%23159;'%20d='M9.13224%203.95443C9.90024%203.95443%2010.5242%204.15843%2011.0042%204.59043C11.4842%205.01043%2011.7242%205.58643%2011.7242%206.30643C11.7242%206.89443%2011.5682%207.38643%2011.2682%207.77043C11.1602%207.90243%2010.8242%208.21443%2010.2602%208.70643C10.0322%208.89843%209.86424%209.11443%209.75624%209.33043C9.62424%209.57043%209.56424%209.83443%209.56424%2010.1224V10.3264H8.28024V10.1224C8.28024%209.67843%208.35224%209.29443%208.52024%208.98243C8.67624%208.64643%209.13224%208.15443%209.87624%207.49443L10.0802%207.26643C10.2962%206.99043%2010.4162%206.70243%2010.4162%206.39043C10.4162%205.97043%2010.2962%205.64643%2010.0682%205.40643C9.82824%205.16643%209.48024%205.04643%209.04824%205.04643C8.50824%205.04643%208.11224%205.21443%207.87224%205.56243C7.65624%205.85043%207.54824%206.25843%207.54824%206.78643H6.28824C6.28824%205.91043%206.54024%205.22643%207.04424%204.72243C7.54824%204.20643%208.24424%203.95443%209.13224%203.95443ZM8.91624%2010.9744C9.16824%2010.9744%209.38424%2011.0464%209.55224%2011.2144C9.72024%2011.3704%209.80424%2011.5744%209.80424%2011.8264C9.80424%2012.0784%209.70824%2012.2824%209.54024%2012.4504C9.37224%2012.6064%209.15624%2012.6904%208.91624%2012.6904C8.67624%2012.6904%208.46024%2012.6064%208.29224%2012.4384C8.12424%2012.2704%208.04024%2012.0664%208.04024%2011.8264C8.04024%2011.5744%208.12424%2011.3704%208.29224%2011.2144C8.46024%2011.0464%208.67624%2010.9744%208.91624%2010.9744Z'%20fill='white'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_387_16301'%3e%3crect%20width='18'%20height='18'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) 我要发帖
我要发帖  资料中心
资料中心 '%20stroke='url(%23paint1_linear_641_37213)'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M7.38135%208.58811C7.38135%207.2561%208.46118%206.17627%209.79319%206.17627C11.1252%206.17627%2012.205%207.2561%2012.205%208.58811C12.205%209.92012%2011.1252%2011%209.79319%2011V12.4471'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M9.79492%2015.3398V15.8222'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_641_37213'%20x1='11'%20y1='1.83496'%20x2='11'%20y2='20.165'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_641_37213'%20x1='11'%20y1='1.83496'%20x2='11'%20y2='20.165'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) FAQ
FAQ '%3e%3cg%20id='Group%201880'%3e%3cpath%20id='Vector'%20d='M10.9997%2020.1654C16.0623%2020.1654%2020.1663%2016.0613%2020.1663%2010.9987C20.1663%205.93609%2016.0623%201.83203%2010.9997%201.83203C5.93706%201.83203%201.83301%205.93609%201.83301%2010.9987C1.83301%2012.2416%202.08036%2013.4267%202.52851%2014.5074C2.7599%2015.0654%203.04482%2015.5956%203.37687%2016.0917C3.48831%2016.2581%203.27925%2017.3105%202.74967%2019.2487C4.68792%2018.7191%205.74025%2018.51%205.90672%2018.6215C6.40273%2018.9535%206.93293%2019.2385%207.49095%2019.4698C8.5717%2019.918%209.75681%2020.1654%2010.9997%2020.1654Z'%20fill='url(%23paint0_linear_369_8392)'%20stroke='url(%23paint1_linear_369_8392)'%20stroke-width='1.83333'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M7.61035%209.08398H15.3009'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M10.0132%207.21289L8.67773%2014.7866'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_4'%20d='M13.2212%207.21289L11.8857%2014.7866'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_5'%20d='M6.69434%2012.832H14.3848'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_369_8392'%20x1='10.9997'%20y1='1.83203'%20x2='10.9997'%20y2='20.1654'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_369_8392'%20x1='10.9997'%20y1='1.83203'%20x2='10.9997'%20y2='20.1654'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3cclipPath%20id='clip0_369_8392'%3e%3crect%20width='22'%20height='22'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) 热门帖子
热门帖子 '/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_369_8417'%20x1='11'%20y1='2.5'%20x2='11'%20y2='19.5'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) 主要贡献者
主要贡献者