MWORKS赋能人形机器人研发探索
一、引言
随着人工智能(AI)技术的不断发展和创新,2025年成为了人形机器人领域的关键转折点。今年初登春晚的杭州宇树机器人集群扭秧歌,4月北京“天工Ultra”夺得全球首个人形机器人半程马拉松比赛冠军等,持续的热点聚焦,正推动人形机器人领域迎来空前热潮。


机器人的发展逐步从“功能导向的人形机器人”向“具身智能机器人”迈进,机器人智能化能力的增强,可以极大提升智能机器人在面对复杂任务、不同场景、实时变化的环境等方面的应用潜力。
随着人形机器人技术的迅速进步和应用领域的不断拓展,其背后的设计与控制难题也日益凸显。尽管机器人在功能和智能化方面取得了显著突破,但要实现更高效、更稳定的运行,仍面临诸多技术瓶颈和挑战。接下来,我们将具体分析人形机器人的设计与稳定控制过程中所遇到的主要难题。
二、难点分析
人形机器人的设计和稳定控制的主要挑战包括:
物理原型依赖度高
人形机器人往往具有高度复杂的机械结构,包含几千个设计零件,如多自由度的关节、连杆以及各种传感器和执行器等部件。因此,传统开发需反复迭代样机,成本与时间消耗巨大;
场景全面性有所欠缺
人形机器人的工作环境通常存在各种不确定性因素,现实场景中难以复现极端条件(如火星/月球地表、核污染区域、深海);
虚拟仿真模型细节不足
人形机器人的仿真模型在细节层次上不足以捕捉真实系统或过程的关键特性,比如几何细节、物理过程细节、以及行为和逻辑细节等,导致仿真结果不够可信、不准确或不适用于预期目的;
训练数据稀缺且周期长
人形机器人在运动过程中,需要时刻识别外界环境,通过算法反馈来调节关节驱动,保持自身保持稳定步态或跑姿;然而控制算法在硬件上调试周期长,且难以捕捉瞬时异常;
多领域系统耦合仿真
人形机器人的建模和控制涉及机械、电气、控制、感知和环境等多学科的深度耦合,其难点在于如何打破学科壁垒进而实现 “模型驱动”的一体化设计与验证闭环。
三、解决方案
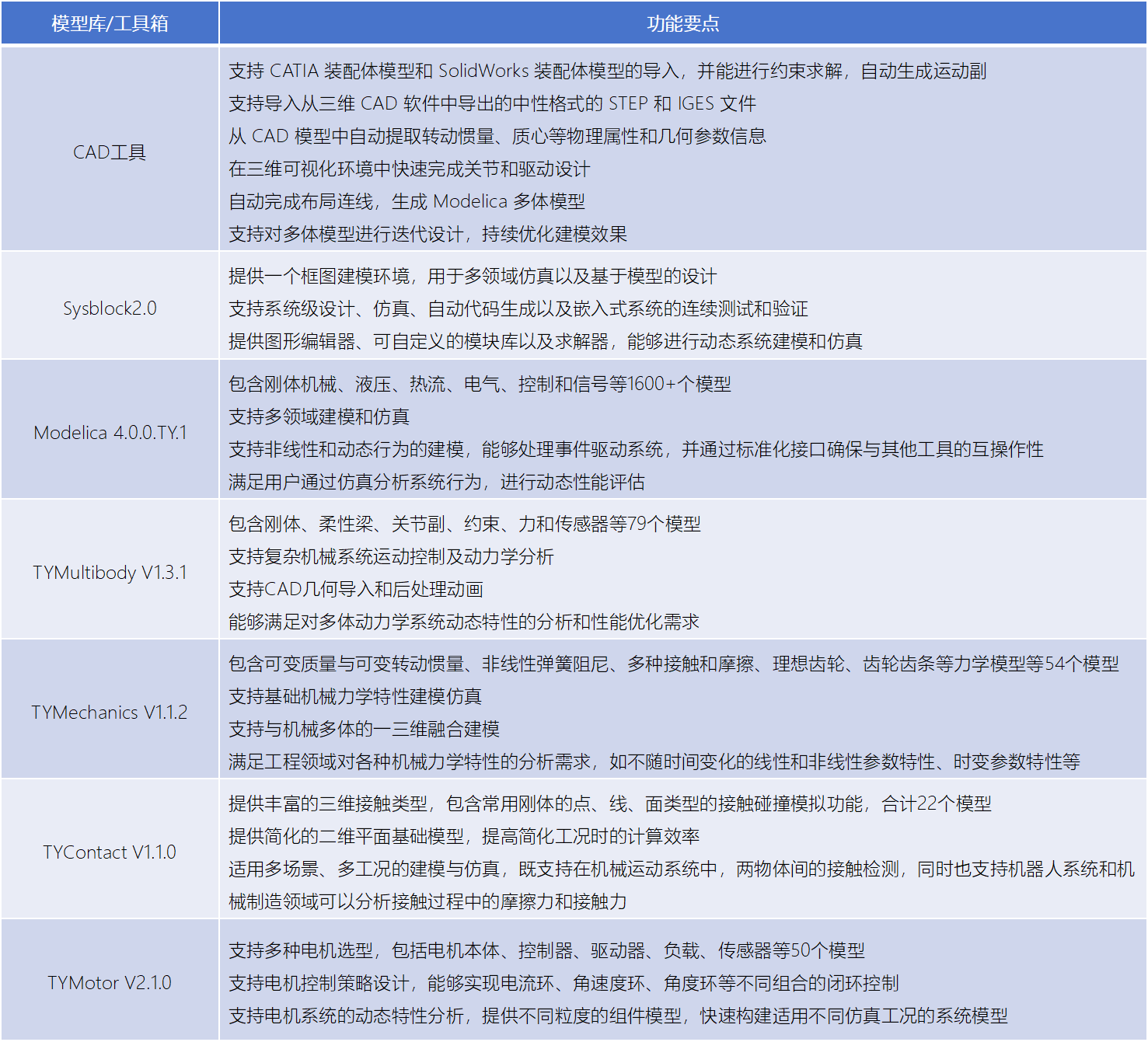
为了能够解决人形机器人设计与控制所面临的难点问题,帮助具身智能快速迭代与发展,同元软控提出采用基于MWORKS平台进行人形机器人的建模与稳定控制。这一方案旨在模拟人形机器人常见的运动场景和步态稳定控制,具体建模内容见表1所示, 所应用的模型库和工具箱简介如表2所示。
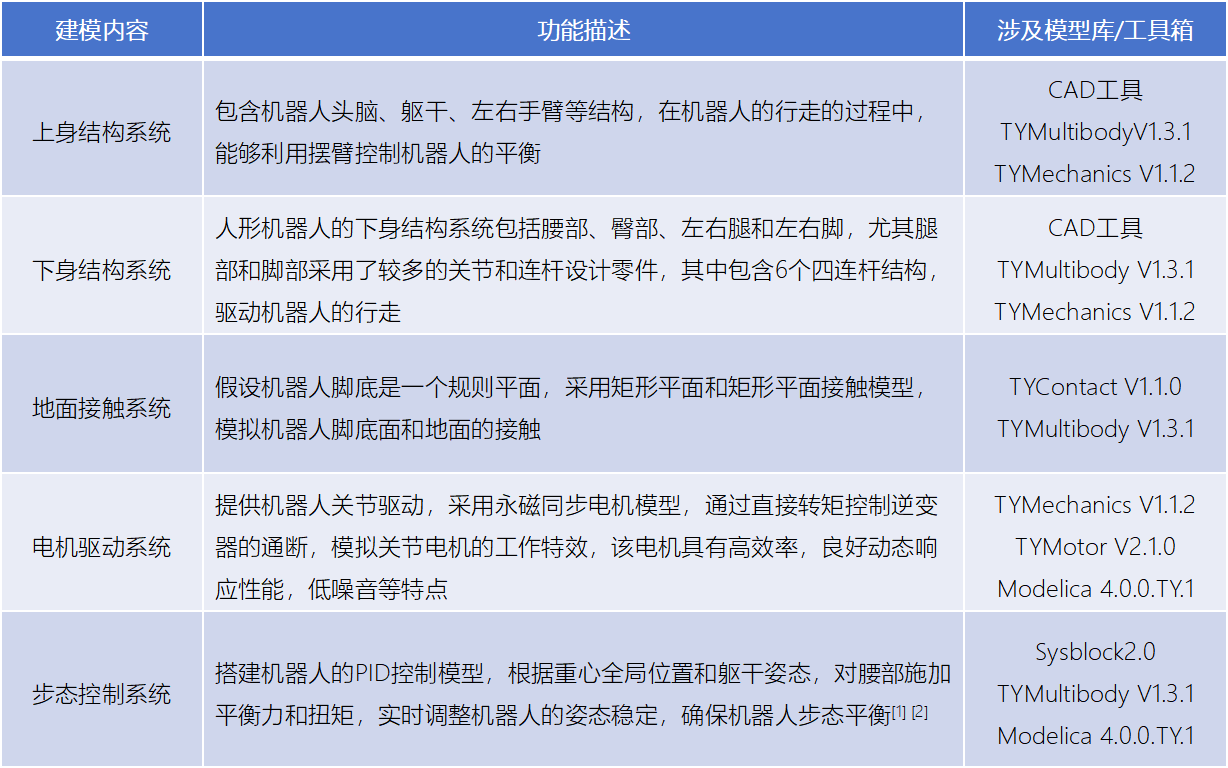
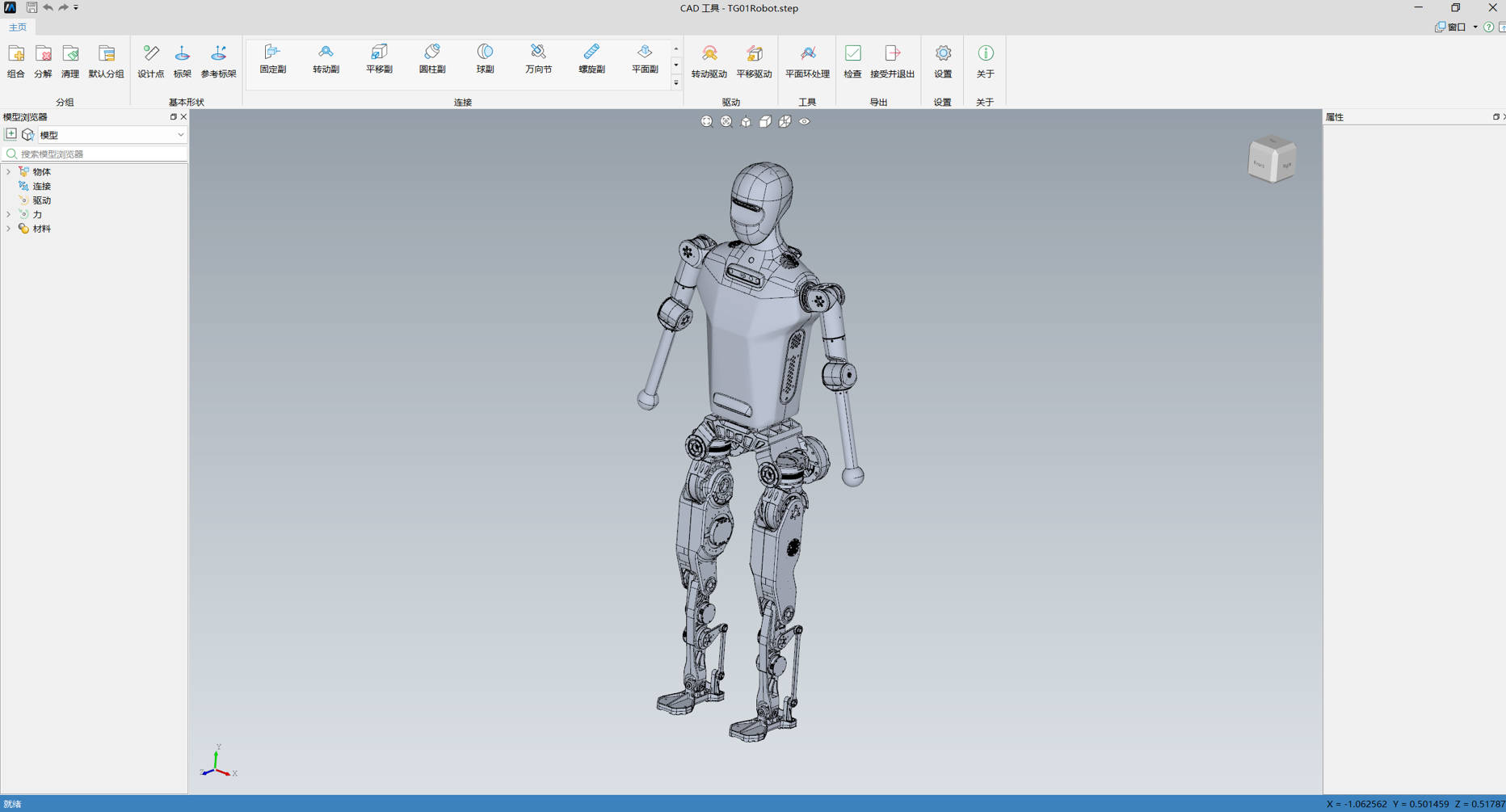
基于表1建模需求,首先,在CAD工具中可以按照如图2所示流程对“天工机器人1.0LITE[3]”模型处理,导入的三维模型如图3所示。

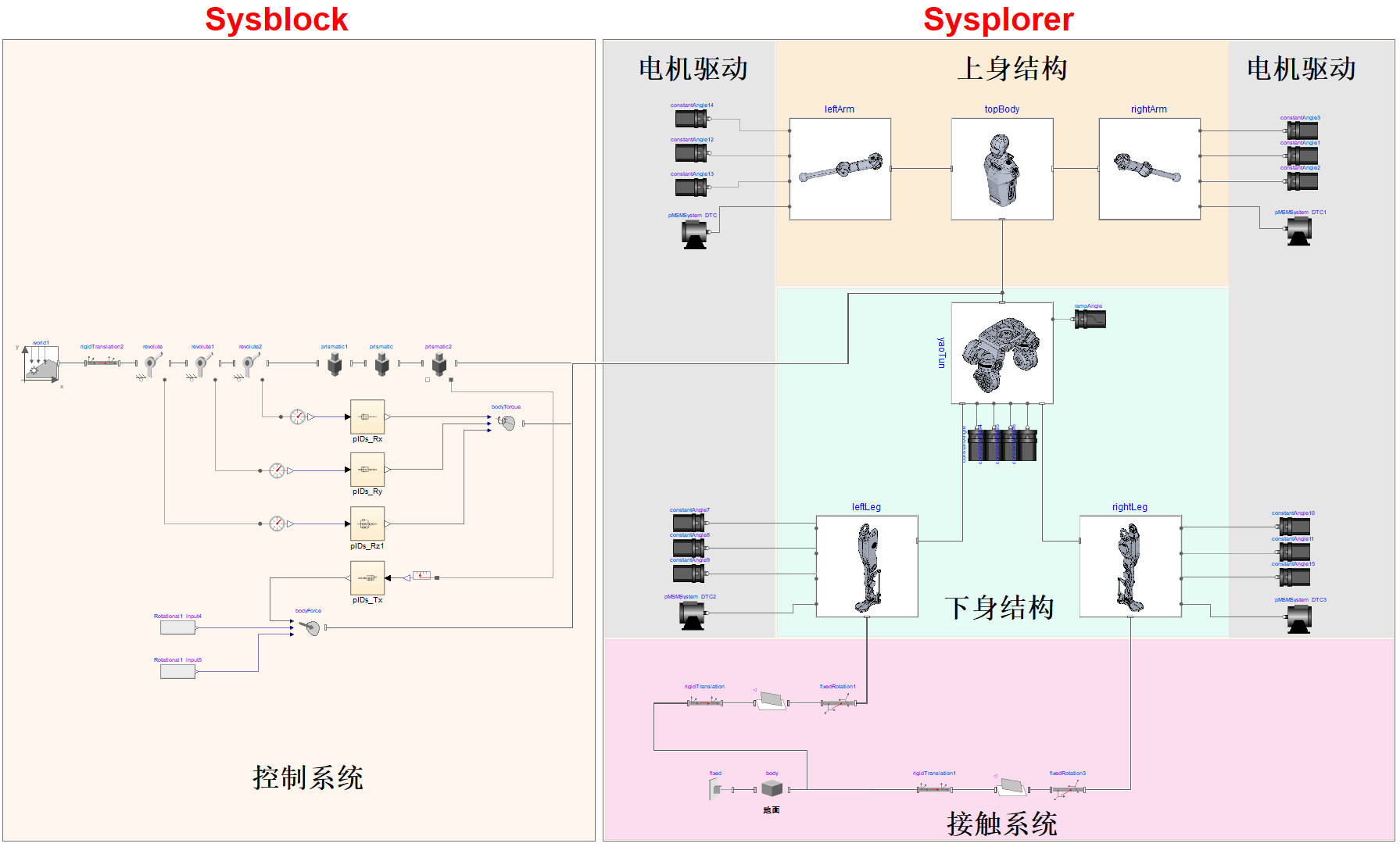
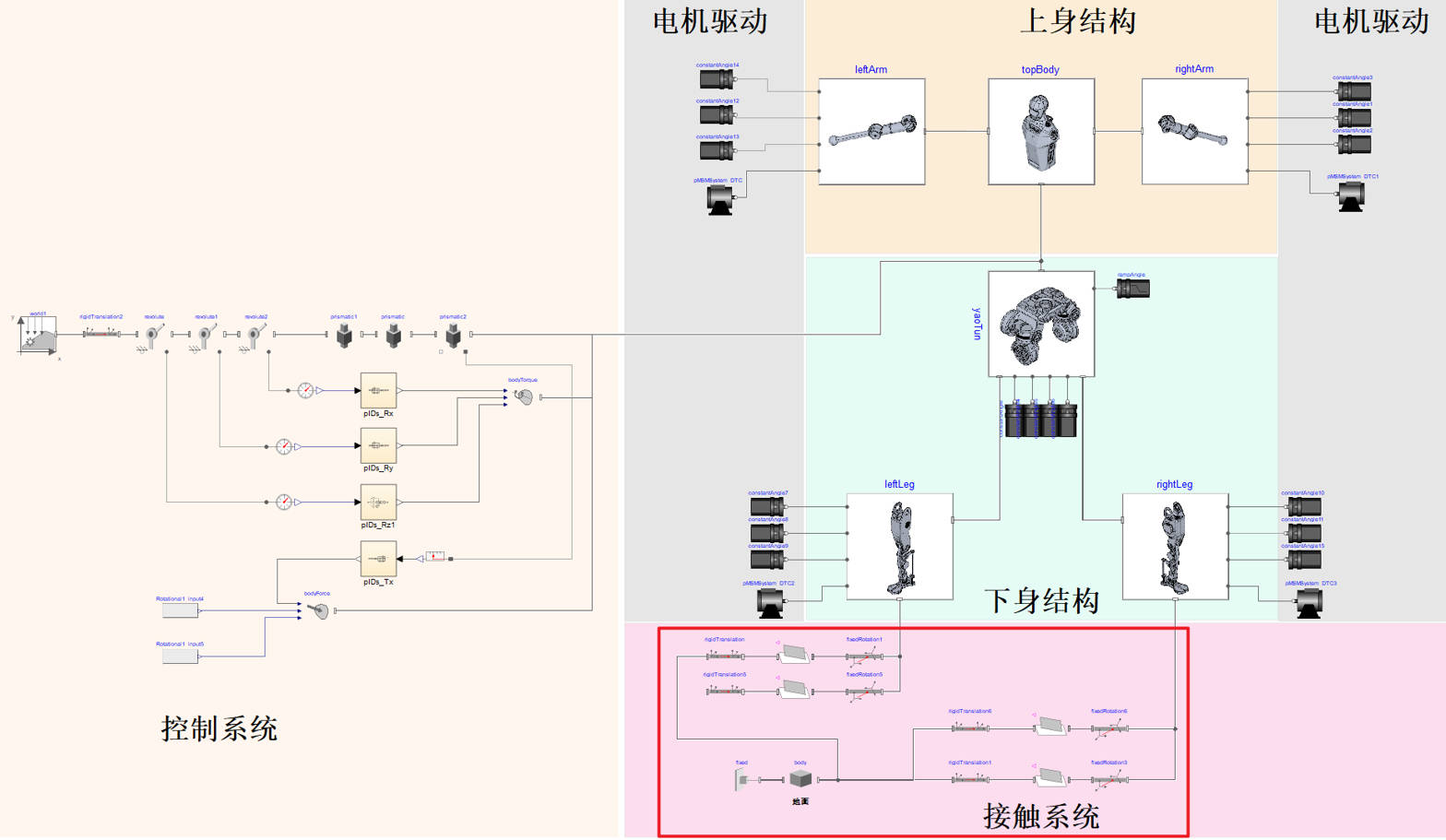
通过分别搭建人形机器人的结构系统(上身+下身结构)、地面接触系统、电机驱动系统和控制系统,能够对人形机器人系统进行精确建模和运动控制,进而为设计人员提供有效的解决方案。
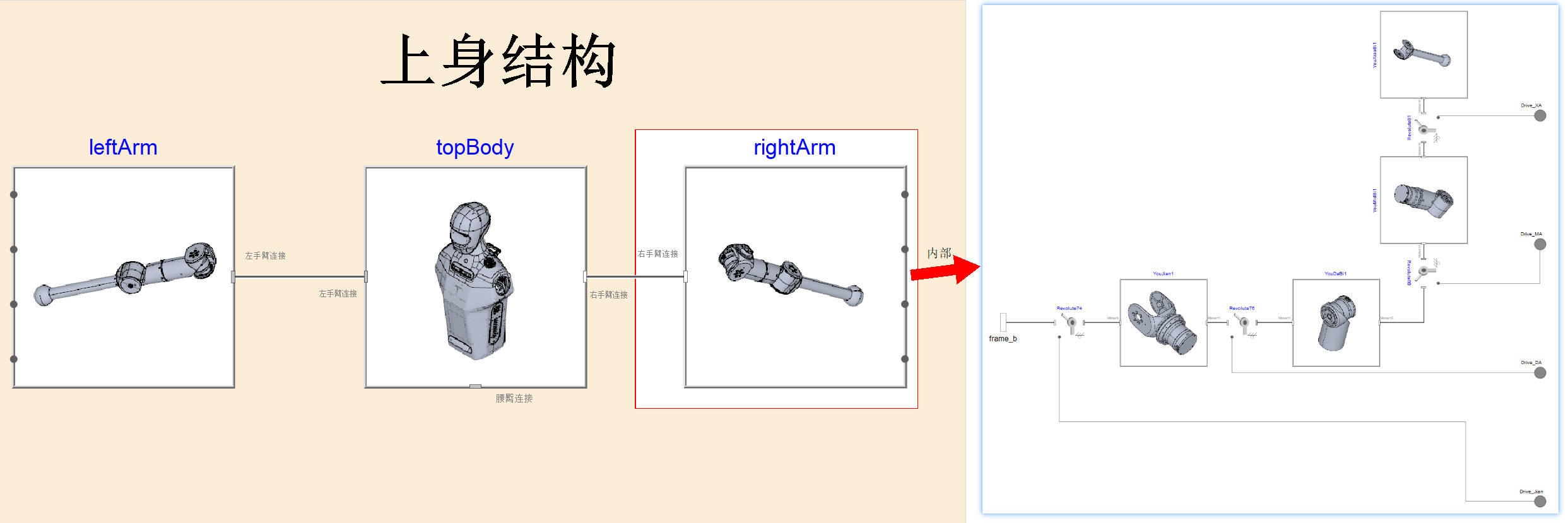
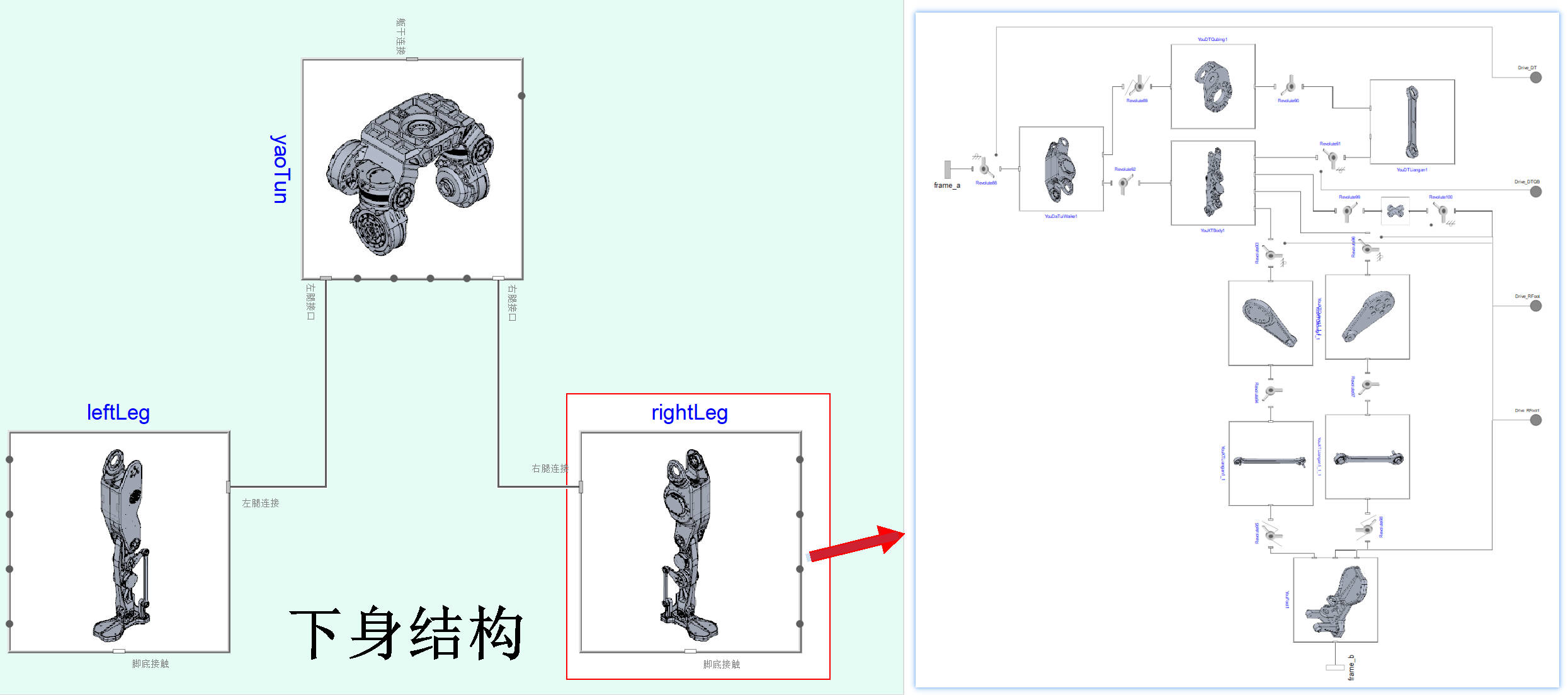
3.1 本体结构系统
机器人的本体结构系统由上身结构系统、下身结构系统组成。将“天工机器人LITE”的三维模型导入至CAD工具中,通过“模型处理”,将三维模型生成身体、左右手臂、腰部、左右腿、左右脚等结构模型,并在运动部件添加相应的转动关节,对生成的Modelica模型封装后,本体上身结构系统和下身结构系统如下所示。
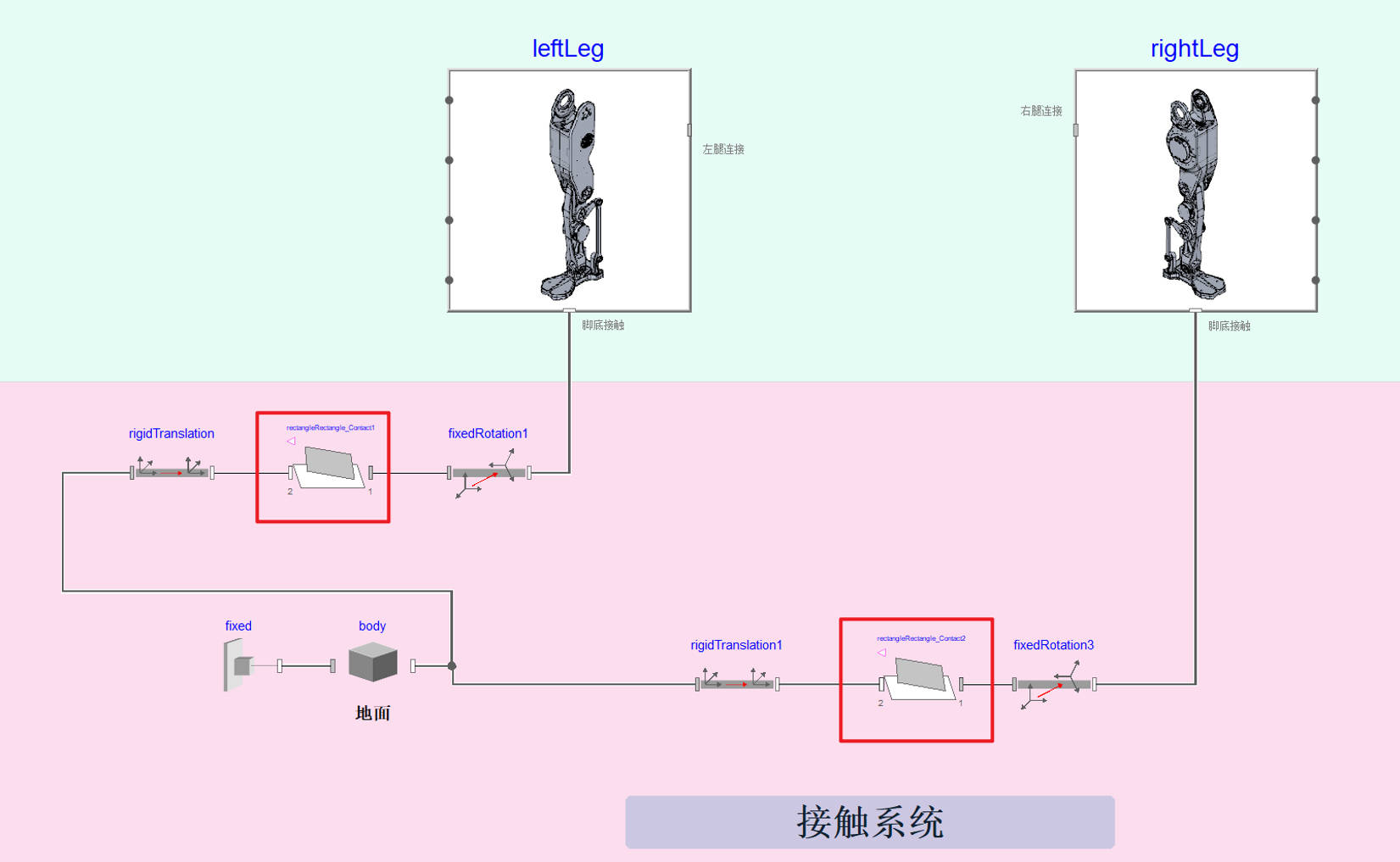
3.2 地面接触系统
人形机器人的脚底只与地面接触,没有固定,因此在机器人运动的过程中,需要根据机器人的动作判断脚底是否与地面保持接触。
假设机器人脚底是一个规则平面,采用接触模型库TYContactV1.1.0中的矩形平面和矩形平面接触模型,模拟机器人脚底面和地面的接触,接触系统如图7所示。
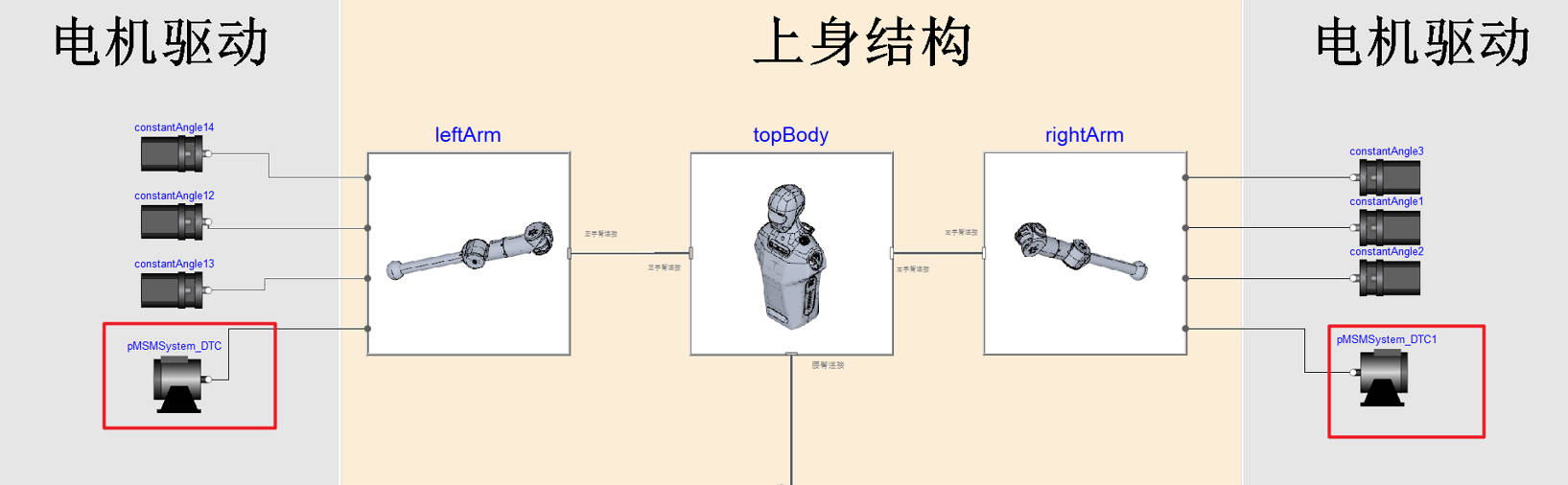
3.3 电机驱动系统
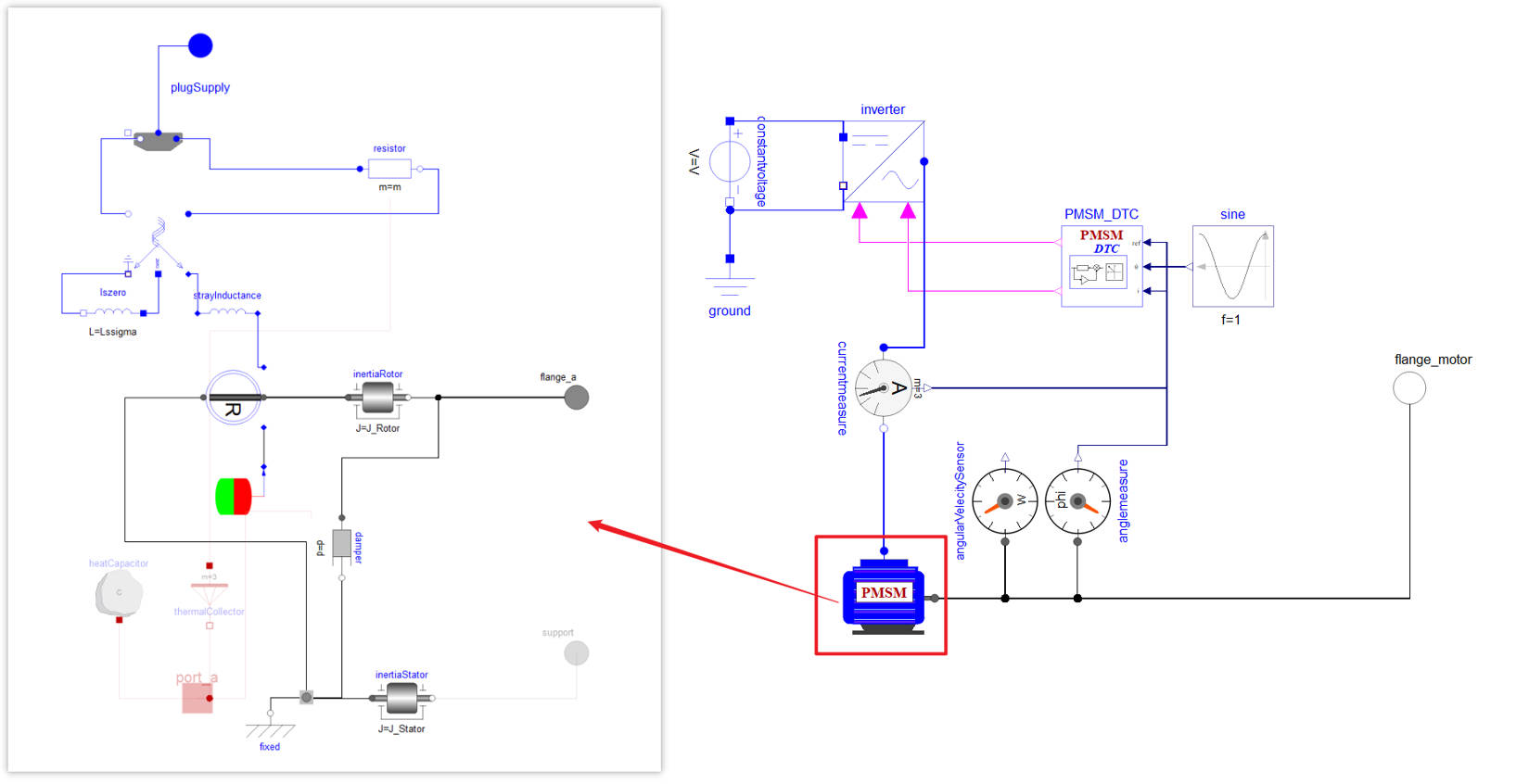
以上身结构中左右手臂的驱动为例,在“肩部”关节施加永磁同步电机,驱动手臂关节的转动,如图8所示。电机的工作电压设置为48V,将电机定子接入三相电源,定子中产生三相电流,定子电流在电机气隙中产生同步旋转磁场。由永磁体构成的转子在磁场的作用下转动,转速与旋转磁场转速相等,永磁同步电机模型的内部组件如图9所示。
3.4 步态控制系统
即使地面有微毫的不平整,也会导致大小与人相近的双足机器人在双足行走过程中摔倒。这是由于不平整的路面引起的轻微震荡导致机器人重心不平衡,因此需要步行稳定控制系统,包含力传感器,加速度传感器、陀螺仪等来修正步态模式,保证机器人稳定行走。
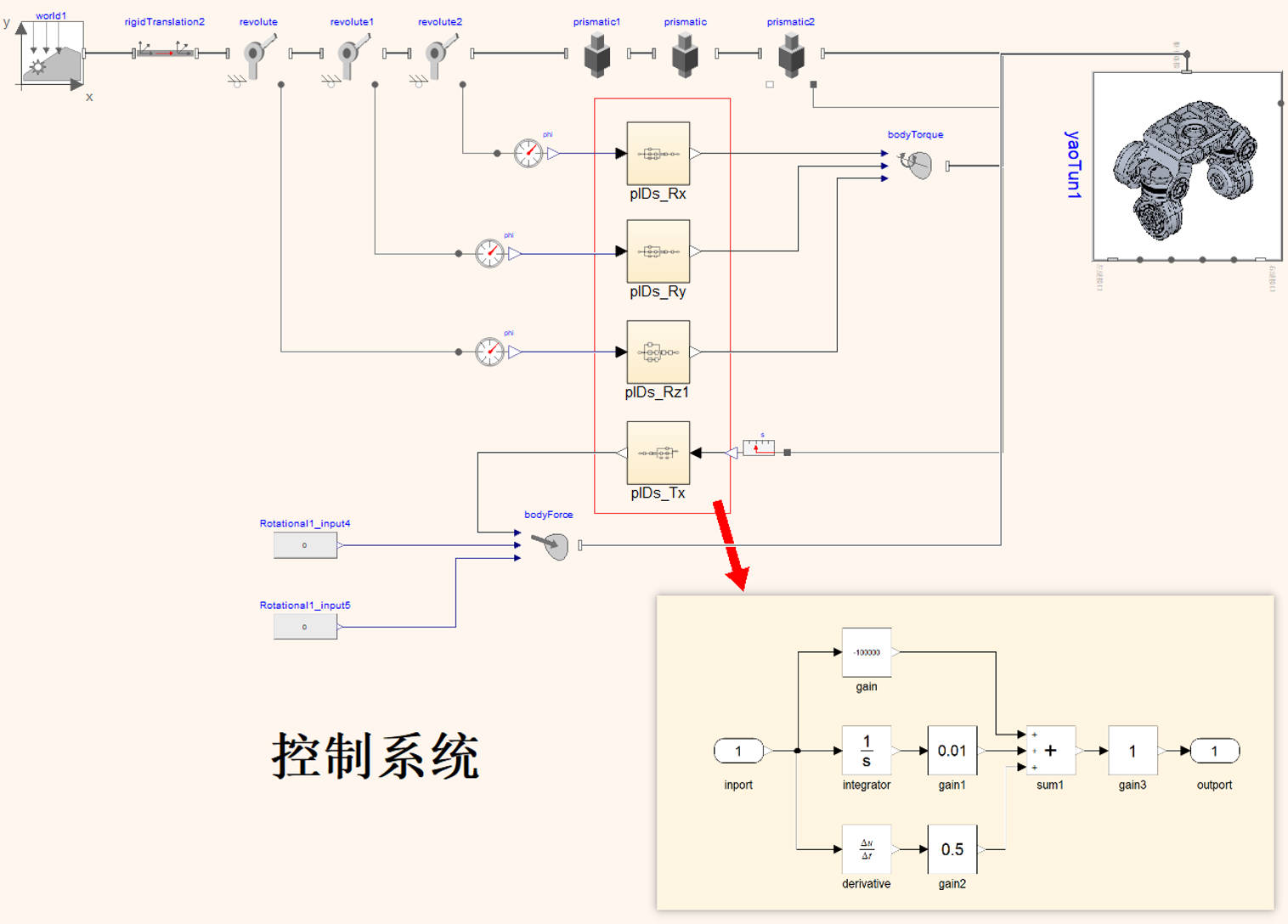
根据机器人的重心位置和躯干姿态调节自身的稳定性,假设身体重心和脚底的连线为三维倒立摆模型,定义其腰部是自由刚体,通过PID控制,对腰部施加平衡力和扭矩,来调整机器人的姿态稳定性,控制系统如图10所示。
四、结果展示
4.1 机器人蹲站挥手
4.2 机器人行走控制
4.3 机器人拟人爬坡
若模拟机器人的行走+爬坡动作,需要将接触地面系统设置为平面和斜坡两个阶段,机器人模型系统如图13所示。
五、总结展望
通过使用MWORKS平台、CAD工具和同元商业库模型进行具身智能机器人的机、电、控等多领域系统建模与稳定控制,可以实现:
- 建立人形机器人的物理模型,包含结构模型、力学模型、控制模型以及电机驱动模型等,系统分析评估人形机器人的运动和力学性能;
- 通过建模地面接触环境,实现机器人的虚拟样机的仿真分析;
- 与电气系统、控制系统的耦合仿真,同时根据机器人的重心和姿态变化,有效控制机器人步态稳定。
后续,我们会在MoHub平台开源该案例,便于更多用户学习和二次开发,以下是几点展望:
- 增加智能机器人的自由度,特别是手部关节,尝试“解锁”更多复杂动作的运动控制和模拟;
- 将部分刚性的机械结构替换为柔性体进行建模,对物理模型精细研究;
- 结合自动场景生成,让机器人在场景中进行强化学习和模仿学习,进而根据复刻实际场景的虚拟训练环境,完成更复杂环境的任务并且应用在实际场景中。
参考文献
[1]. 梶田秀司.人形机器人 [M].第二版.北京:机械工业出版社,2024
[2]. 朴松昊,王险峰,蔡则苏.机器人控制系统建模与仿真(基于MWORKS) [M]. 北京:电子工业出版社,2024
[3]. 机器人三维本体来源:GitHub - x-humanoid-robomind/TienKung_URDFnKung_URDF
'%3e%3cg%20id='Group'%3e%3cpath%20id='Vector'%20d='M12%2012.0002C13.933%2012.0002%2015.5%2010.4331%2015.5%208.50009C15.5%206.56705%2013.933%205%2012%205C10.067%205%208.5%206.56705%208.5%208.50009C8.5%2010.4331%2010.067%2012.0002%2012%2012.0002Z'%20fill='white'%20stroke='white'%20stroke-width='1.40002'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M19.5%2021.6877C19.5%2019.6985%2018.7098%2017.7908%2017.3033%2016.3843C15.8968%2014.9777%2013.9891%2014.1875%2012%2014.1875C10.0109%2014.1875%208.10322%2014.9777%206.6967%2016.3843C5.29018%2017.7908%204.5%2019.6985%204.5%2021.6877'%20stroke='white'%20stroke-width='1.87503'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M12%2014.1875C10.0109%2014.1875%208.10322%2014.9777%206.6967%2016.3843C5.29018%2017.7908%204.5%2019.6985%204.5%2021.6877H19.5C19.5%2019.6985%2018.7098%2017.7908%2017.3033%2016.3843C15.8968%2014.9777%2013.9891%2014.1875%2012%2014.1875Z'%20fill='white'%20stroke='white'%20stroke-width='1.87503'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3crect%20x='2.15'%20y='2.15'%20width='19.7'%20height='19.7'%20rx='9.85'%20stroke='%23F96A02'%20stroke-width='0.3'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_474_37108'%3e%3crect%20x='2'%20y='2'%20width='20'%20height='20'%20rx='10'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e)
'%3e%3cg%20id='Group%201882'%3e%3cg%20id='Group%201881'%3e%3cpath%20id='Vector'%20d='M16.3334%202.02441H1.66675V14.5244H6.91675L9.00008%2016.6077L11.0834%2014.5244H16.3334V2.02441Z'%20stroke='white'%20stroke-width='1.25'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3cpath%20id='&%23239;&%23188;&%23159;'%20d='M9.13224%203.95443C9.90024%203.95443%2010.5242%204.15843%2011.0042%204.59043C11.4842%205.01043%2011.7242%205.58643%2011.7242%206.30643C11.7242%206.89443%2011.5682%207.38643%2011.2682%207.77043C11.1602%207.90243%2010.8242%208.21443%2010.2602%208.70643C10.0322%208.89843%209.86424%209.11443%209.75624%209.33043C9.62424%209.57043%209.56424%209.83443%209.56424%2010.1224V10.3264H8.28024V10.1224C8.28024%209.67843%208.35224%209.29443%208.52024%208.98243C8.67624%208.64643%209.13224%208.15443%209.87624%207.49443L10.0802%207.26643C10.2962%206.99043%2010.4162%206.70243%2010.4162%206.39043C10.4162%205.97043%2010.2962%205.64643%2010.0682%205.40643C9.82824%205.16643%209.48024%205.04643%209.04824%205.04643C8.50824%205.04643%208.11224%205.21443%207.87224%205.56243C7.65624%205.85043%207.54824%206.25843%207.54824%206.78643H6.28824C6.28824%205.91043%206.54024%205.22643%207.04424%204.72243C7.54824%204.20643%208.24424%203.95443%209.13224%203.95443ZM8.91624%2010.9744C9.16824%2010.9744%209.38424%2011.0464%209.55224%2011.2144C9.72024%2011.3704%209.80424%2011.5744%209.80424%2011.8264C9.80424%2012.0784%209.70824%2012.2824%209.54024%2012.4504C9.37224%2012.6064%209.15624%2012.6904%208.91624%2012.6904C8.67624%2012.6904%208.46024%2012.6064%208.29224%2012.4384C8.12424%2012.2704%208.04024%2012.0664%208.04024%2011.8264C8.04024%2011.5744%208.12424%2011.3704%208.29224%2011.2144C8.46024%2011.0464%208.67624%2010.9744%208.91624%2010.9744Z'%20fill='white'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_387_16301'%3e%3crect%20width='18'%20height='18'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) 我要发帖
我要发帖  资料中心
资料中心 '%20stroke='url(%23paint1_linear_641_37213)'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M7.38135%208.58811C7.38135%207.2561%208.46118%206.17627%209.79319%206.17627C11.1252%206.17627%2012.205%207.2561%2012.205%208.58811C12.205%209.92012%2011.1252%2011%209.79319%2011V12.4471'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M9.79492%2015.3398V15.8222'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_641_37213'%20x1='11'%20y1='1.83496'%20x2='11'%20y2='20.165'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_641_37213'%20x1='11'%20y1='1.83496'%20x2='11'%20y2='20.165'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) FAQ
FAQ '%3e%3cg%20id='Group%201880'%3e%3cpath%20id='Vector'%20d='M10.9997%2020.1654C16.0623%2020.1654%2020.1663%2016.0613%2020.1663%2010.9987C20.1663%205.93609%2016.0623%201.83203%2010.9997%201.83203C5.93706%201.83203%201.83301%205.93609%201.83301%2010.9987C1.83301%2012.2416%202.08036%2013.4267%202.52851%2014.5074C2.7599%2015.0654%203.04482%2015.5956%203.37687%2016.0917C3.48831%2016.2581%203.27925%2017.3105%202.74967%2019.2487C4.68792%2018.7191%205.74025%2018.51%205.90672%2018.6215C6.40273%2018.9535%206.93293%2019.2385%207.49095%2019.4698C8.5717%2019.918%209.75681%2020.1654%2010.9997%2020.1654Z'%20fill='url(%23paint0_linear_369_8392)'%20stroke='url(%23paint1_linear_369_8392)'%20stroke-width='1.83333'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M7.61035%209.08398H15.3009'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M10.0132%207.21289L8.67773%2014.7866'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_4'%20d='M13.2212%207.21289L11.8857%2014.7866'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_5'%20d='M6.69434%2012.832H14.3848'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_369_8392'%20x1='10.9997'%20y1='1.83203'%20x2='10.9997'%20y2='20.1654'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_369_8392'%20x1='10.9997'%20y1='1.83203'%20x2='10.9997'%20y2='20.1654'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3cclipPath%20id='clip0_369_8392'%3e%3crect%20width='22'%20height='22'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) 热门帖子
热门帖子 '/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_369_8417'%20x1='11'%20y1='2.5'%20x2='11'%20y2='19.5'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) 主要贡献者
主要贡献者