在实际工作中,有时需要对模型进行半实物仿真,以此来验证模型的正确性。本文将以六步换相模型部署到树莓派4B为例,讲述如何将已建立好的模型以代码生成的形式部署到树莓派中。
前期准备
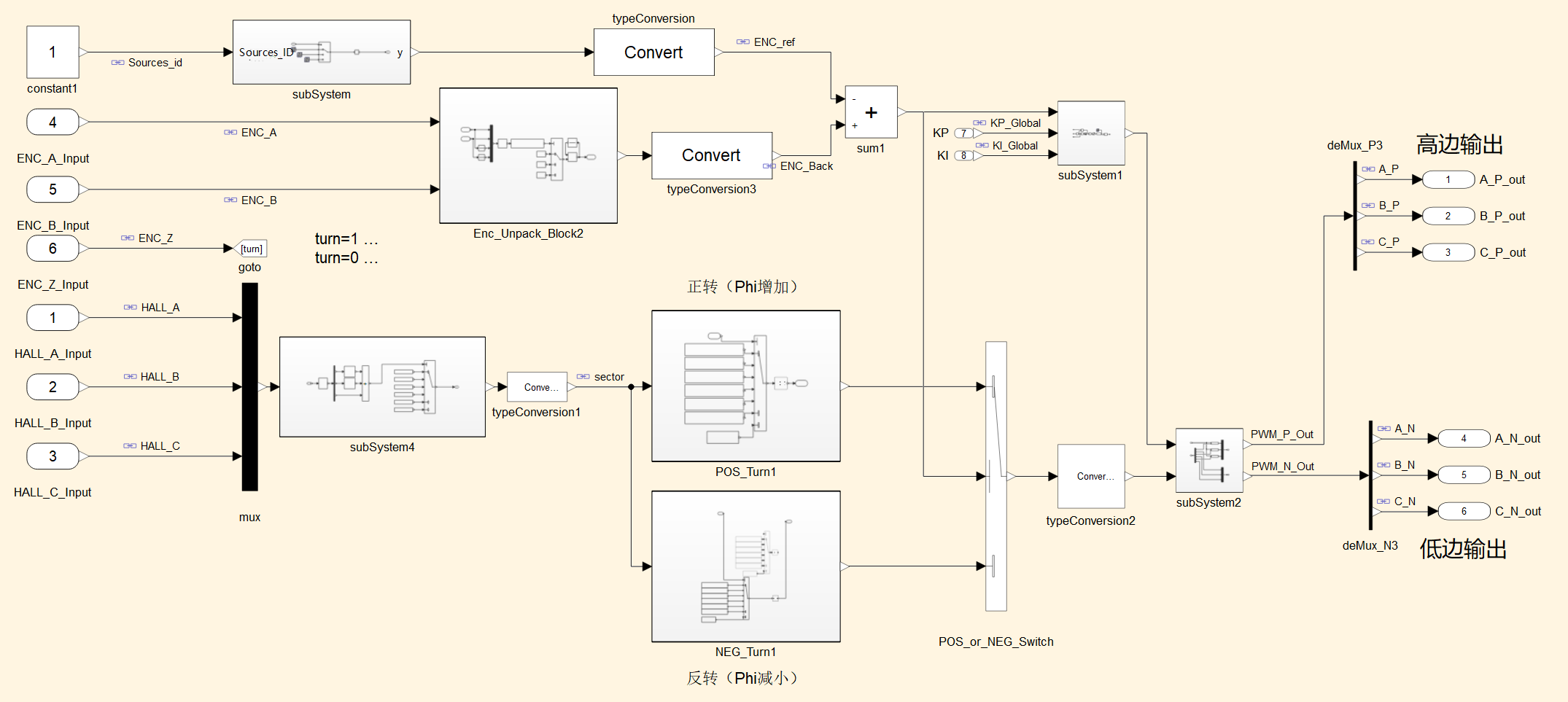
模型准备
本文使用的模型为无刷直流电机(BLDC)的六步换相模型,基本原理为利用电磁作用在定子上的三个相绕组中产生扭矩,然后根据霍尔传感器对转子位置的检测对转子进行分区控制。其中增量式编码器会输出转子更具体的位置,将这个位置与目标角度使用PID进行调节以控制定子中的PWM输出和正反转控制最后完成对电机的控制。
树莓派与驱动板准备
- 使用的树莓派为树莓派4B
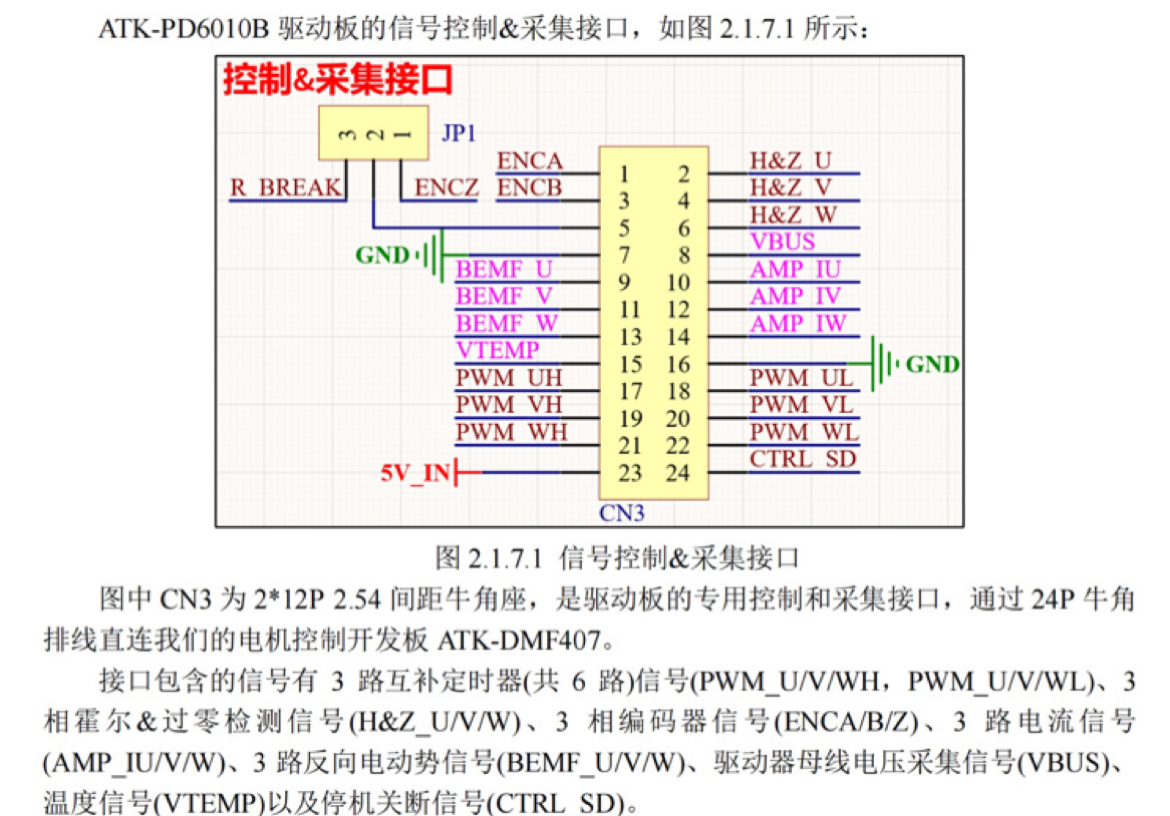
- 使用的驱动板为ATK-PD6010B
- 使用的无刷直流电机为42JSF630AS-1000
- 导线若干
代码生成
1.解压最下方上传的附件1(模型及数据字典文件.7z),打开For_emd_code_2;
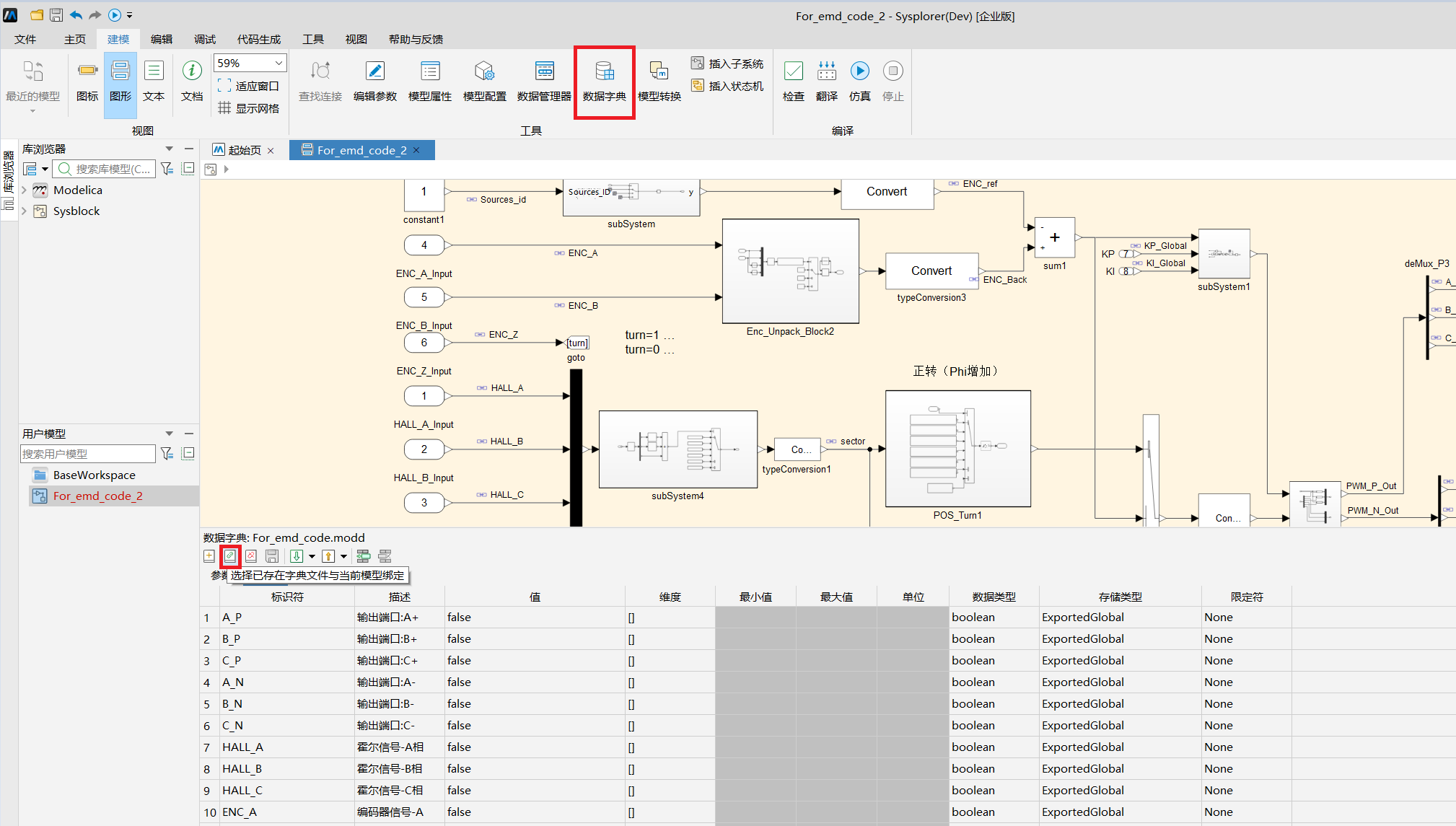
2.检查数据字典是否绑定成功,若未绑定点击进入数据字典,并点击选择已存在字典文件与当前模型绑定,选择解压包中的MODD文件完成绑定;
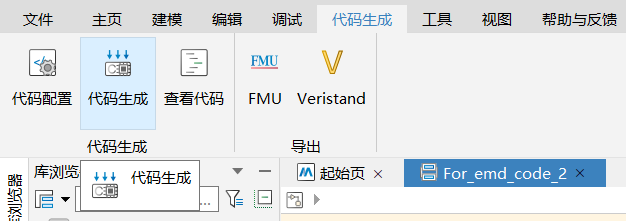
3.检查绑定后,点击代码生成,生成代码;
4.生成后点击代码生成路径进行跳转或复制地址进行跳转;
5.跳转后进入文件夹点击mwb_main进入并进行修改;
6.首先增加需要引用的头文件与定义树莓派的接口,define的接口可以根据不同的需求进行修改,本文的接口仅做参考,下图为修改前后的代码;
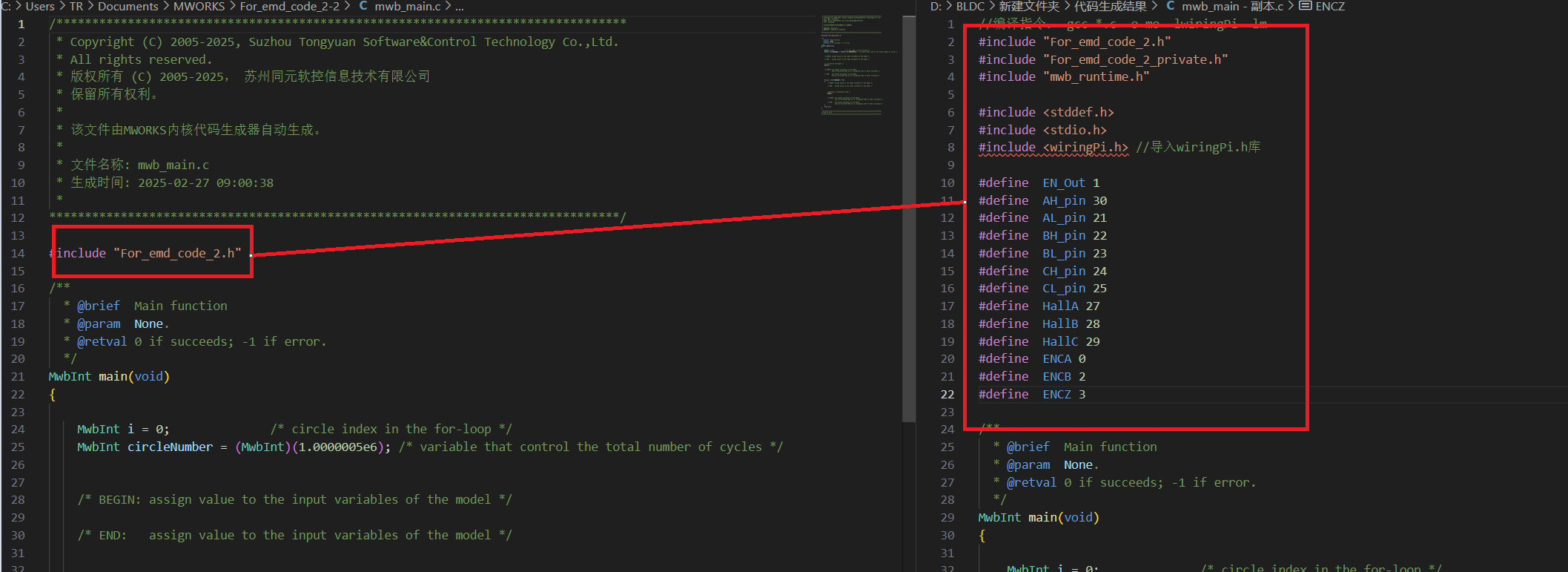
#include "For_emd_code_2_private.h"//声明头文件
#include "mwb_runtime.h"
#include <stddef.h>
#include <stdio.h>
#include <wiringPi.h> //导入wiringPi.h库
#define EN_Out 1//设置引脚
#define AH_pin 30//输出的引脚
#define AL_pin 21
#define BH_pin 22
#define BL_pin 23
#define CH_pin 24
#define CL_pin 25
#define HallA 27//输入的霍尔变量
#define HallB 28
#define HallC 29
#define ENCA 0//编码器的输出
#define ENCB 2
#define ENCZ 3
代码说明:
- #include "For_emd_code_2_private声明头文件,为下文写入变量做准备;
- #include <wiringPi.h>引脚设置所需要的库;
- #define EN_Out 1对端口名命名。
7.对端口的输出模式进行设置,其中Sources_id为目标角度波形更换参数,后续可以再模型中的subsystem中进行修改,PWM_up为PWM的上限限制,避免因其过快的转速导致驱动板过流,余下的KI_Global,KP_Global为PID参数;
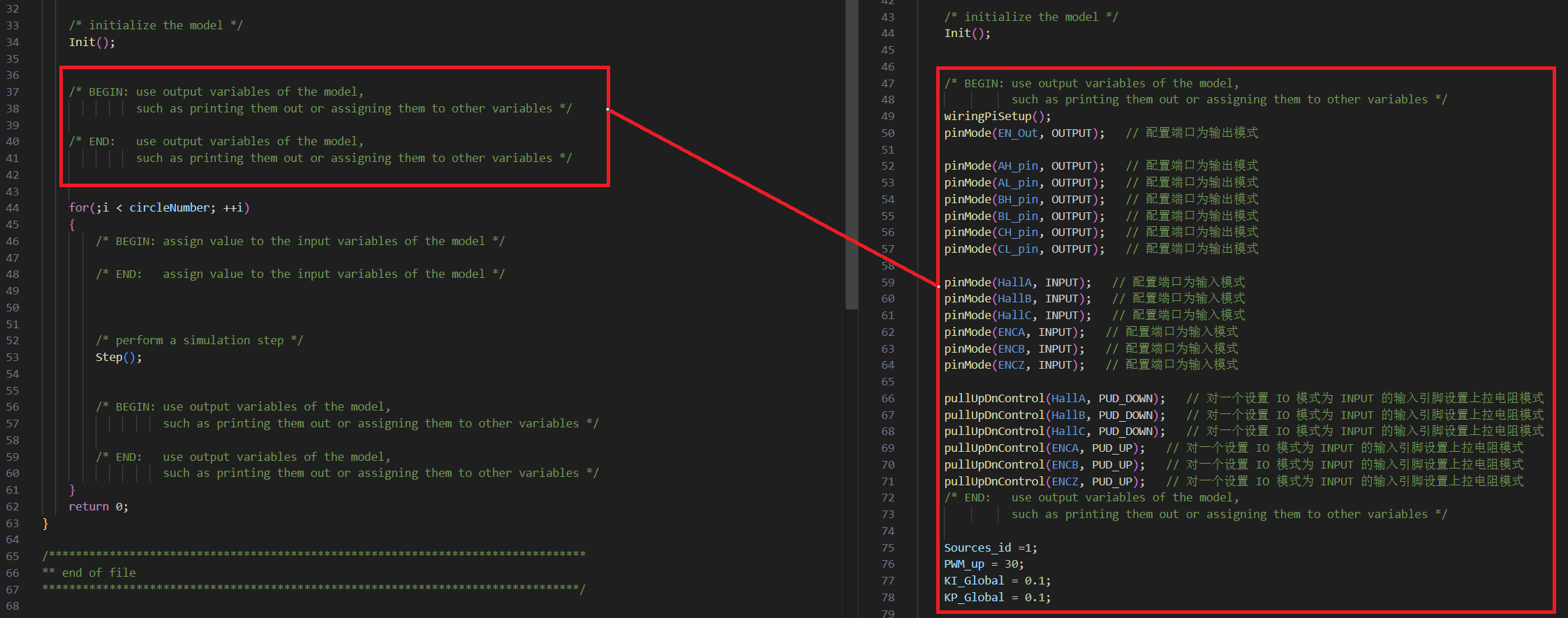
wiringPiSetup();
pinMode(EN_Out, OUTPUT); // 配置端口为输出模式
pinMode(AH_pin, OUTPUT); // 配置端口为输出模式
pinMode(AL_pin, OUTPUT); // 配置端口为输出模式
pinMode(BH_pin, OUTPUT); // 配置端口为输出模式
pinMode(BL_pin, OUTPUT); // 配置端口为输出模式
pinMode(CH_pin, OUTPUT); // 配置端口为输出模式
pinMode(CL_pin, OUTPUT); // 配置端口为输出模式
pinMode(HallA, INPUT); // 配置端口为输入模式
pinMode(HallB, INPUT); // 配置端口为输入模式
pinMode(HallC, INPUT); // 配置端口为输入模式
pinMode(ENCA, INPUT); // 配置端口为输入模式
pinMode(ENCB, INPUT); // 配置端口为输入模式
pinMode(ENCZ, INPUT); // 配置端口为输入模式
pullUpDnControl(HallA, PUD_DOWN); // 对一个设置 IO 模式为 INPUT 的输入引脚设置上拉电阻模式
pullUpDnControl(HallB, PUD_DOWN); // 对一个设置 IO 模式为 INPUT 的输入引脚设置上拉电阻模式
pullUpDnControl(HallC, PUD_DOWN); // 对一个设置 IO 模式为 INPUT 的输入引脚设置上拉电阻模式
pullUpDnControl(ENCA, PUD_UP); // 对一个设置 IO 模式为 INPUT 的输入引脚设置上拉电阻模式
pullUpDnControl(ENCB, PUD_UP); // 对一个设置 IO 模式为 INPUT 的输入引脚设置上拉电阻模式
pullUpDnControl(ENCZ, PUD_UP); // 对一个设置 IO 模式为 INPUT 的输入引脚设置上拉电阻模式
/* END: use output variables of the model,
such as printing them out or assigning them to other variables */
Sources_id =1;
PWM_up = 30;
KI_Global = 0.1;
KP_Global = 0.1;
8.下面是树莓派端口读取和写入的设置,printf函数在电机运转的同时输出,会对电机的运转过程造成干涉,所以仅在调试过程中可以打开;
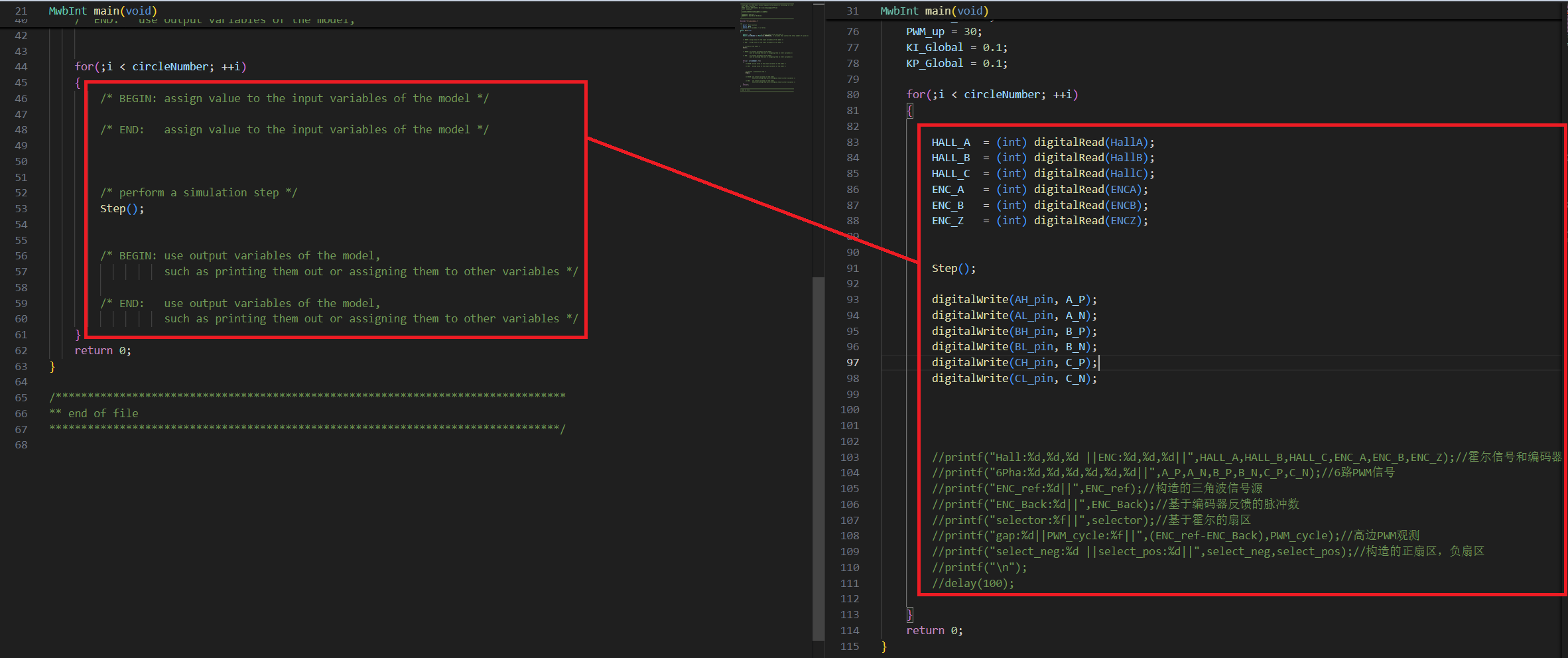
HALL_A = (int) digitalRead(HallA); //读取树莓派引脚输出的霍尔信号与编码器信号
HALL_B = (int) digitalRead(HallB);
HALL_C = (int) digitalRead(HallC);
ENC_A = (int) digitalRead(ENCA);
ENC_B = (int) digitalRead(ENCB);
ENC_Z = (int) digitalRead(ENCZ);
Step();
digitalWrite(AH_pin, A_P);//将计算得出的控制信号写入引脚
digitalWrite(AL_pin, A_N);
digitalWrite(BH_pin, B_P);
digitalWrite(BL_pin, B_N);
digitalWrite(CH_pin, C_P);
digitalWrite(CL_pin, C_N);
//printf("Hall:%d,%d,%d ||ENC:%d,%d,%d||",HALL_A,HALL_B,HALL_C,ENC_A,ENC_B,ENC_Z);//霍尔信号和编码器信号
//printf("6Pha:%d,%d,%d,%d,%d,%d||",A_P,A_N,B_P,B_N,C_P,C_N);//6路PWM信号
//printf("ENC_ref:%d||",ENC_ref);//构造的三角波信号源
//printf("ENC_Back:%d||",ENC_Back);//基于编码器反馈的脉冲数
//printf("gap:%d||PWM_cycle:%f||",(ENC_ref-ENC_Back),PWM_cycle);//高边PWM观测
//printf("select_neg:%d ||select_pos:%d||",select_neg,select_pos);//构造的正扇区,负扇区
//printf("\n");
//delay(100);
9.更改后的代码见最下方上传的附件2(mwb_main.c),如果修改不成功可以考虑使用上面的代码覆盖源代码,如果对模型名称有修改的话,需要对代码的名称及内部描述的引用文件进行修改。
PC与树莓派连接
1.本文使用MobaXterm对树莓派进行控制,首先接线。根据下图所示信息进行接线

将两板接线;
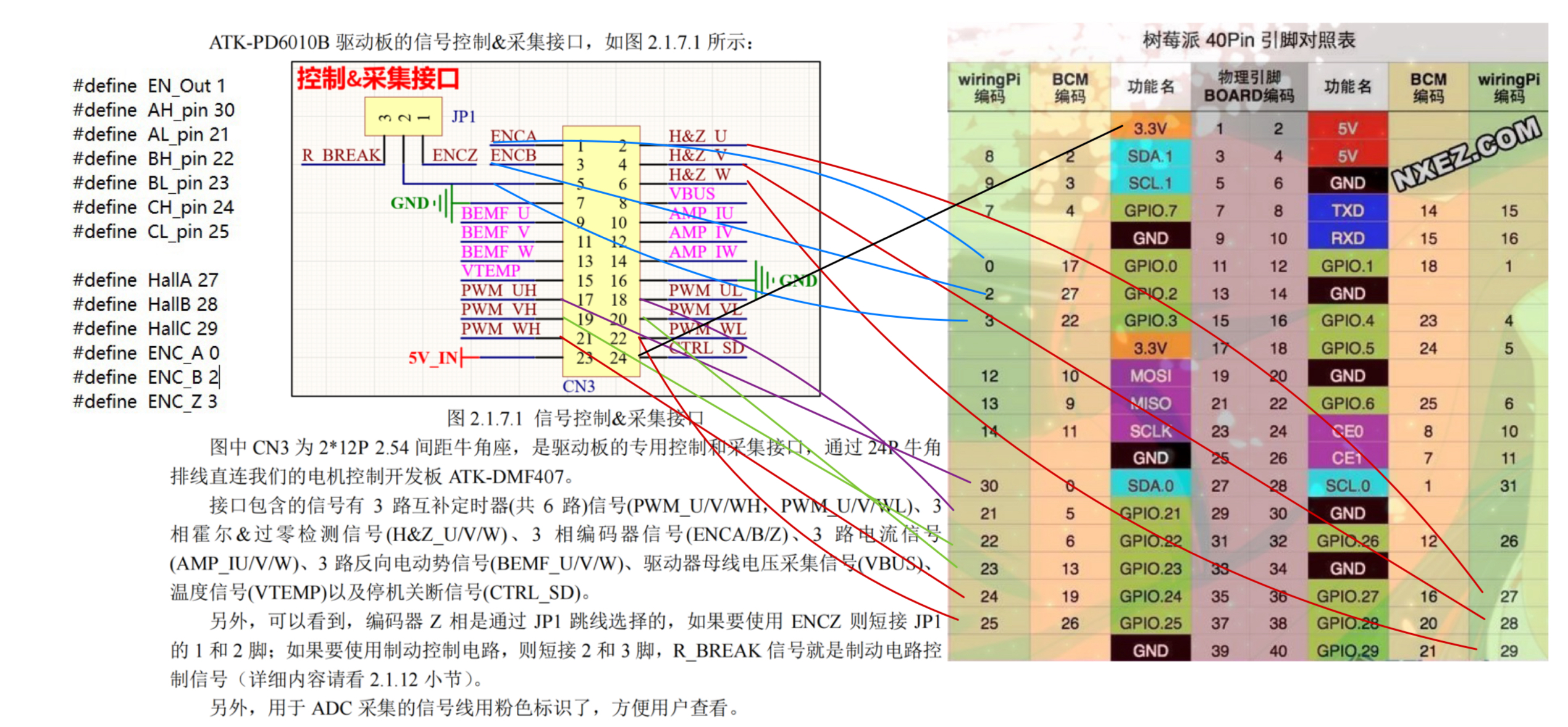
下图为实际的接线图;
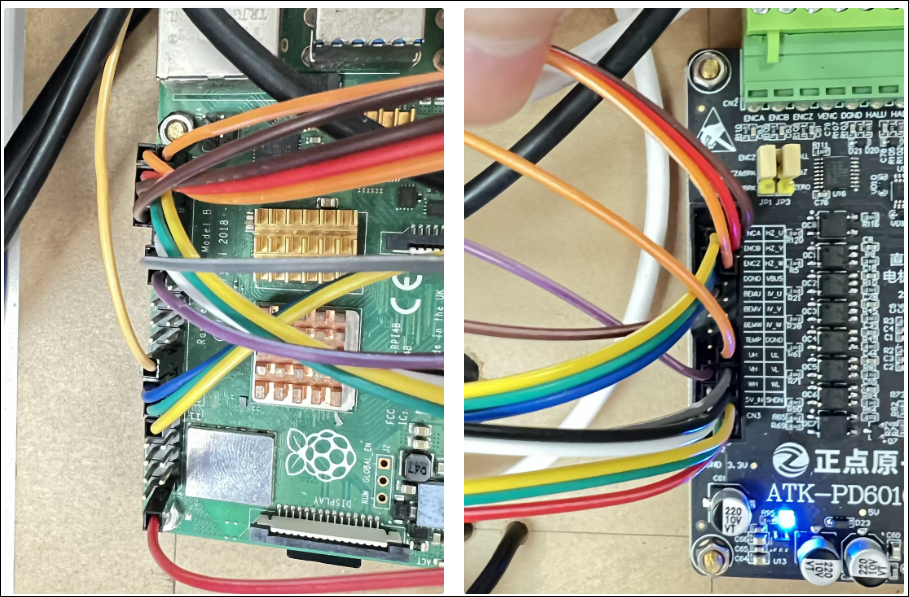
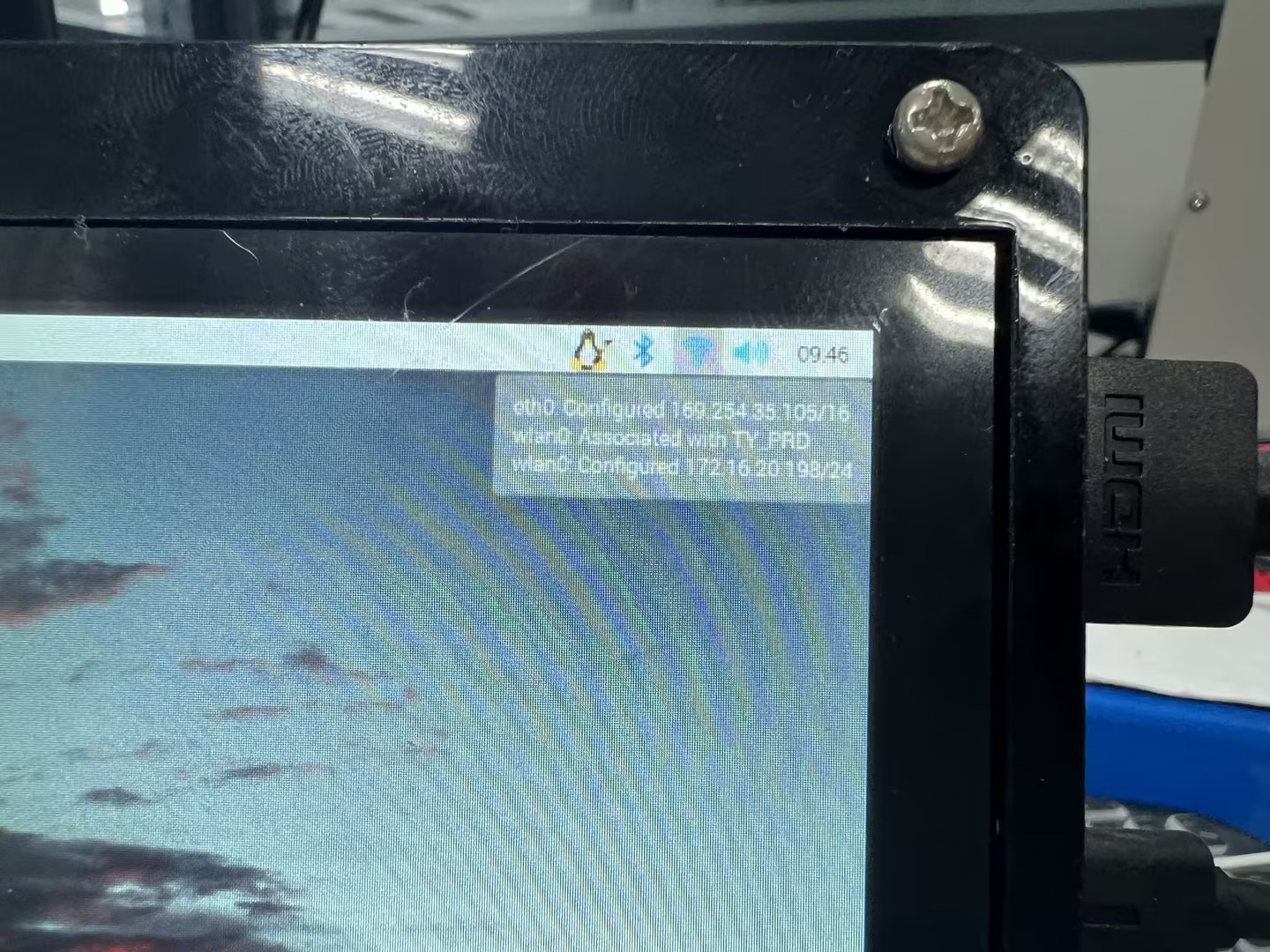
2.接线后将树莓派与PC建立连接,可以使用网线连接或网络连接均可无线网络则连接wlan0的地址,网线连接则连接eth0;
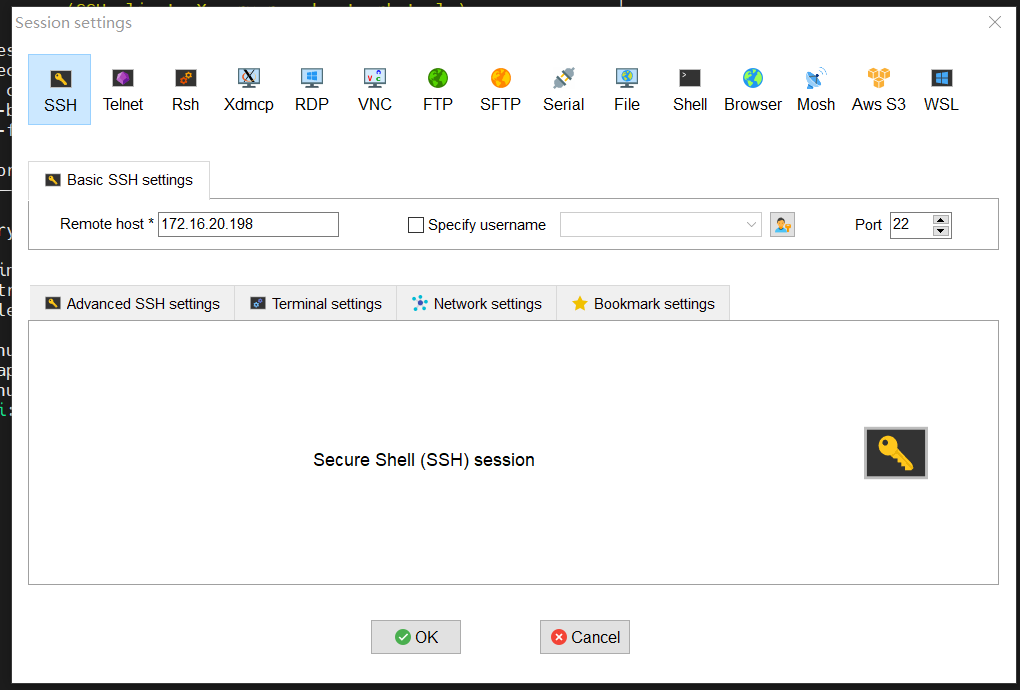
3.点击菜单中的Sessions,再点击New Session新建连接,本文使用ssh进行连接;
4.连接成功后进入菜单。
部署代码
1.在菜单中新建文件夹;
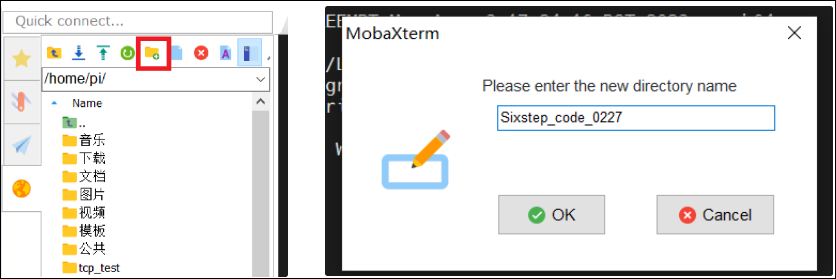
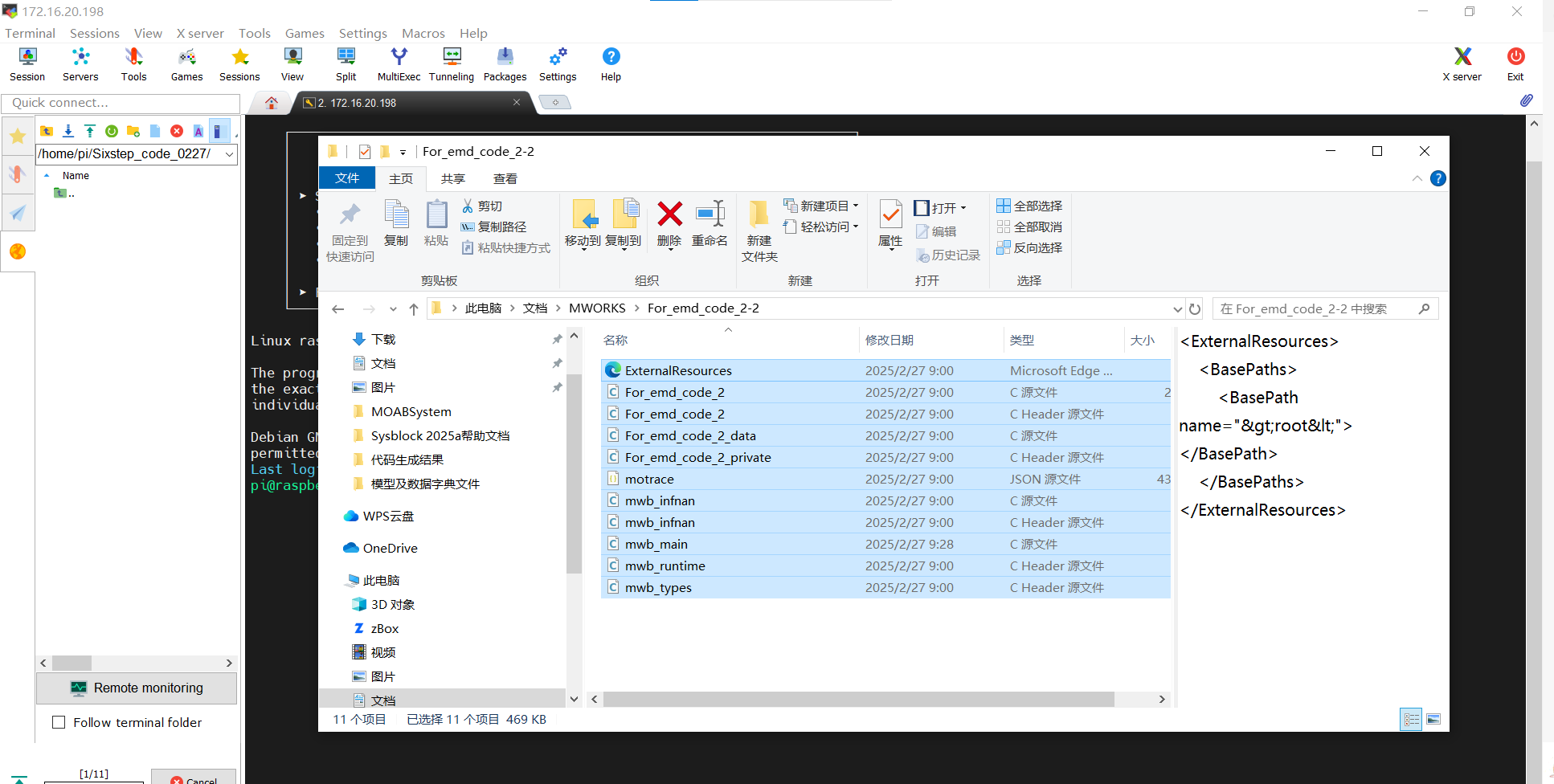
2.将生成好的代码拖入文件夹;
3.进入路径
cd /home/pi/Sixstep_code_0227/
4.对文件进行编译
gcc *.c -o mo -lwiringPi -lm
5.运行编译好的文件
./mo
实际运行效果见附件3(运行效果.mp4)。
 3 个附件(1086kb)
3 个附件(1086kb) '%3e%3cg%20id='Group'%3e%3cpath%20id='Vector'%20d='M12%2012.0002C13.933%2012.0002%2015.5%2010.4331%2015.5%208.50009C15.5%206.56705%2013.933%205%2012%205C10.067%205%208.5%206.56705%208.5%208.50009C8.5%2010.4331%2010.067%2012.0002%2012%2012.0002Z'%20fill='white'%20stroke='white'%20stroke-width='1.40002'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M19.5%2021.6877C19.5%2019.6985%2018.7098%2017.7908%2017.3033%2016.3843C15.8968%2014.9777%2013.9891%2014.1875%2012%2014.1875C10.0109%2014.1875%208.10322%2014.9777%206.6967%2016.3843C5.29018%2017.7908%204.5%2019.6985%204.5%2021.6877'%20stroke='white'%20stroke-width='1.87503'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M12%2014.1875C10.0109%2014.1875%208.10322%2014.9777%206.6967%2016.3843C5.29018%2017.7908%204.5%2019.6985%204.5%2021.6877H19.5C19.5%2019.6985%2018.7098%2017.7908%2017.3033%2016.3843C15.8968%2014.9777%2013.9891%2014.1875%2012%2014.1875Z'%20fill='white'%20stroke='white'%20stroke-width='1.87503'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3crect%20x='2.15'%20y='2.15'%20width='19.7'%20height='19.7'%20rx='9.85'%20stroke='%23F96A02'%20stroke-width='0.3'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_474_37108'%3e%3crect%20x='2'%20y='2'%20width='20'%20height='20'%20rx='10'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e)
'%3e%3cg%20id='Group%201882'%3e%3cg%20id='Group%201881'%3e%3cpath%20id='Vector'%20d='M16.3334%202.02441H1.66675V14.5244H6.91675L9.00008%2016.6077L11.0834%2014.5244H16.3334V2.02441Z'%20stroke='white'%20stroke-width='1.25'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3cpath%20id='&%23239;&%23188;&%23159;'%20d='M9.13224%203.95443C9.90024%203.95443%2010.5242%204.15843%2011.0042%204.59043C11.4842%205.01043%2011.7242%205.58643%2011.7242%206.30643C11.7242%206.89443%2011.5682%207.38643%2011.2682%207.77043C11.1602%207.90243%2010.8242%208.21443%2010.2602%208.70643C10.0322%208.89843%209.86424%209.11443%209.75624%209.33043C9.62424%209.57043%209.56424%209.83443%209.56424%2010.1224V10.3264H8.28024V10.1224C8.28024%209.67843%208.35224%209.29443%208.52024%208.98243C8.67624%208.64643%209.13224%208.15443%209.87624%207.49443L10.0802%207.26643C10.2962%206.99043%2010.4162%206.70243%2010.4162%206.39043C10.4162%205.97043%2010.2962%205.64643%2010.0682%205.40643C9.82824%205.16643%209.48024%205.04643%209.04824%205.04643C8.50824%205.04643%208.11224%205.21443%207.87224%205.56243C7.65624%205.85043%207.54824%206.25843%207.54824%206.78643H6.28824C6.28824%205.91043%206.54024%205.22643%207.04424%204.72243C7.54824%204.20643%208.24424%203.95443%209.13224%203.95443ZM8.91624%2010.9744C9.16824%2010.9744%209.38424%2011.0464%209.55224%2011.2144C9.72024%2011.3704%209.80424%2011.5744%209.80424%2011.8264C9.80424%2012.0784%209.70824%2012.2824%209.54024%2012.4504C9.37224%2012.6064%209.15624%2012.6904%208.91624%2012.6904C8.67624%2012.6904%208.46024%2012.6064%208.29224%2012.4384C8.12424%2012.2704%208.04024%2012.0664%208.04024%2011.8264C8.04024%2011.5744%208.12424%2011.3704%208.29224%2011.2144C8.46024%2011.0464%208.67624%2010.9744%208.91624%2010.9744Z'%20fill='white'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3cclipPath%20id='clip0_387_16301'%3e%3crect%20width='18'%20height='18'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) 我要发帖
我要发帖  资料中心
资料中心 '%20stroke='url(%23paint1_linear_641_37213)'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M7.38135%208.58811C7.38135%207.2561%208.46118%206.17627%209.79319%206.17627C11.1252%206.17627%2012.205%207.2561%2012.205%208.58811C12.205%209.92012%2011.1252%2011%209.79319%2011V12.4471'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M9.79492%2015.3398V15.8222'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_641_37213'%20x1='11'%20y1='1.83496'%20x2='11'%20y2='20.165'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_641_37213'%20x1='11'%20y1='1.83496'%20x2='11'%20y2='20.165'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) FAQ
FAQ '%3e%3cg%20id='Group%201880'%3e%3cpath%20id='Vector'%20d='M10.9997%2020.1654C16.0623%2020.1654%2020.1663%2016.0613%2020.1663%2010.9987C20.1663%205.93609%2016.0623%201.83203%2010.9997%201.83203C5.93706%201.83203%201.83301%205.93609%201.83301%2010.9987C1.83301%2012.2416%202.08036%2013.4267%202.52851%2014.5074C2.7599%2015.0654%203.04482%2015.5956%203.37687%2016.0917C3.48831%2016.2581%203.27925%2017.3105%202.74967%2019.2487C4.68792%2018.7191%205.74025%2018.51%205.90672%2018.6215C6.40273%2018.9535%206.93293%2019.2385%207.49095%2019.4698C8.5717%2019.918%209.75681%2020.1654%2010.9997%2020.1654Z'%20fill='url(%23paint0_linear_369_8392)'%20stroke='url(%23paint1_linear_369_8392)'%20stroke-width='1.83333'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_2'%20d='M7.61035%209.08398H15.3009'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_3'%20d='M10.0132%207.21289L8.67773%2014.7866'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_4'%20d='M13.2212%207.21289L11.8857%2014.7866'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3cpath%20id='Vector_5'%20d='M6.69434%2012.832H14.3848'%20stroke='white'%20stroke-width='1.83333'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_369_8392'%20x1='10.9997'%20y1='1.83203'%20x2='10.9997'%20y2='20.1654'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_369_8392'%20x1='10.9997'%20y1='1.83203'%20x2='10.9997'%20y2='20.1654'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3cclipPath%20id='clip0_369_8392'%3e%3crect%20width='22'%20height='22'%20fill='white'/%3e%3c/clipPath%3e%3c/defs%3e%3c/svg%3e) 热门帖子
热门帖子 '/%3e%3c/g%3e%3c/g%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_369_8417'%20x1='11'%20y1='2.5'%20x2='11'%20y2='19.5'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23FF9849'/%3e%3cstop%20offset='1'%20stop-color='%23FF6705'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) 主要贡献者
主要贡献者