
'%3e%3cg%20id='编组'%20transform='translate(600.000000,%20248.000000)'%3e%3cmask%20id='mask-2'%20fill='white'%3e%3cuse%20xlink:href='%23path-1'%3e%3c/use%3e%3c/mask%3e%3cg%20id='Clip-2'%3e%3c/g%3e%3cpath%20d='M10.2668637,10.8710643%20C10.2668637,11.0790074%2010.1039142,11.2482675%209.89741264,11.2482675%20L9.64421692,11.2482675%20C9.44059555,11.2482675%209.27773336,11.0790074%209.27773336,10.8740056%20L9.27773336,3.32459352%20C9.27773336,3.11665045%209.44347575,2.95024251%209.64421692,2.95024251%20L9.89741264,2.95024251%20C10.101034,2.95024251%2010.2639835,3.11959178%2010.2639835,3.32459352%20L10.2668637,10.8710643%20Z%20M8.36706667,3.91580073%20L5.79234292,3.91580073%20C5.58872155,3.91580073%205.42577208,3.74645146%205.42577208,3.54144972%20C5.42577208,3.33350664%205.59160175,3.16709871%205.79234292,3.16709871%20L8.00049583,3.16709871%20C8.2041172,3.16709871%208.36706667,3.33644797%208.36706667,3.54144972%20L8.36706667,3.91580073%20Z%20M8.36706667,6.69375265%20L5.79234292,6.69375265%20C5.58872155,6.69375265%205.42577208,6.52431425%205.42577208,6.31940163%20C5.42577208,6.11145856%205.59160175,5.94505062%205.79234292,5.94505062%20L8.00049583,5.94505062%20C8.2041172,5.94505062%208.36706667,6.11439989%208.36706667,6.31940163%20L8.36706667,6.69375265%20Z%20M8.00049583,8.82995997%20L1.28003046,8.82995997%20C1.07640908,8.82995997%200.913459618,8.66052157%200.913459618,8.45551982%20C0.913459618,8.24757675%201.07928928,8.08116881%201.28003046,8.08116881%20L8.00049583,8.08116881%20C8.2041172,8.08116881%208.36706667,8.25060721%208.36706667,8.45551982%20C8.36706667,8.6634629%208.2041172,8.82995997%208.00049583,8.82995997%20L8.00049583,8.82995997%20Z%20M1.28003046,3.16709871%20L4.00024791,3.16709871%20C4.20386929,3.16709871%204.36681875,3.33644797%204.36681875,3.54144972%20L4.36681875,6.31940163%20C4.36681875,6.52743384%204.20098909,6.69375265%204.00024791,6.69375265%20L1.28003046,6.69375265%20C1.07640908,6.69375265%200.913459618,6.52431425%200.913459618,6.31940163%20L0.913459618,3.54144972%20C0.913459618,3.33350664%201.07928928,3.16709871%201.28003046,3.16709871%20L1.28003046,3.16709871%20Z%20M10.6363147,2.19859915%20L9.64709712,2.19859915%20C9.44347575,2.19859915%209.28061356,2.02916076%209.28061356,1.82424814%20L9.28061356,0.751643356%20C9.28061356,0.552613401%209.20206267,0.362496565%209.06529684,0.219886655%20C8.92861828,0.0802180743%208.73948518,0%208.54459169,0%20L0.736021876,0%20C0.541041102,0%200.354875483,0.0802180743%200.215229449,0.219886655%20C0.078550894,0.359466104%200,0.552613401%200,0.751643356%20L0,10.8740056%20C0,11.1740212%200.116342602,11.4593302%200.322844174,11.6702146%20C0.529433025,11.8811881%200.811692571,12%201.10259271,12%20L9.89741264,12%20C10.191193,12%2010.470485,11.8811881%2010.6770739,11.6702146%20C10.8835755,11.4593302%2010.9999596,11.1710799%2010.9999596,10.8740056%20L10.9999596,2.57286104%20C11.0029728,2.36491796%2010.8370559,2.19859915%2010.6363147,2.19859915%20L10.6363147,2.19859915%20Z'%20id='Fill-1'%20fill='%232EB0DF'%20mask='url(%23mask-2)'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 介绍
介绍'%20fill-rule='nonzero'%3e%3cg%20id='wenjian-2'%20transform='translate(266.000000,%20248.000000)'%3e%3cpath%20d='M0,13%20L0,0%20L5.92307692,0%20L5.92307692,4.875%20L11,4.875%20L11,13%20L0,13%20Z%20M5.5,6.09375%20C5.5,5.86938432%205.31058201,5.6875%205.07692308,5.6875%20L1.26923077,5.6875%20C1.03557184,5.6875%200.846153846,5.86938432%200.846153846,6.09375%20L0.846153846,7.3125%20C0.846153846,7.53686568%201.03557184,7.71875%201.26923077,7.71875%20L5.07692308,7.71875%20C5.31058201,7.71875%205.5,7.53686568%205.5,7.3125%20L5.5,6.09375%20Z%20M10.1538462,8.9375%20C10.1538462,8.71313432%209.96442816,8.53125%209.73076923,8.53125%20L1.26923077,8.53125%20C1.03557184,8.53125%200.846153846,8.71313432%200.846153846,8.9375%20L0.846153846,10.15625%20C0.846153846,10.3806157%201.03557184,10.5625%201.26923077,10.5625%20L9.73076923,10.5625%20C9.96442816,10.5625%2010.1538462,10.3806157%2010.1538462,10.15625%20L10.1538462,8.9375%20Z'%20id='形状'%20fill='%233CC451'%3e%3c/path%3e%3cpolygon%20id='路径'%20fill='%23B0E7B8'%20points='7%200%2011%204%207%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 文件
文件磁浮列车动态仿真
获奖团队介绍
学校:北京交通大学
指导老师:杜欣
团队成员:王战阳、陶浩鹏、潘雨冉、张雨笑
简介
磁浮列车实际上是依靠电磁吸力或电动斥力将列车悬浮于空中并进行导向,实现列车与地面轨道间的无机械接触,然后利用线性电机驱动列车运行。本案例介绍磁悬浮列车静态悬浮控制仿真分析,分别通过电流控制系统和气隙控制系统实现列车静态悬浮。
电磁悬浮就是对车载的、置于导轨下方的悬浮电磁铁通电励磁而产生电场,磁铁与轨道上的铁磁构件相互吸引,将列车向上吸起悬浮于轨道上,磁铁和铁磁轨道之间的悬浮间隙一般约为8—12mm。列车通过控制悬浮磁铁的励磁电流来保证稳定的悬浮间隙,通过直线电机来牵引列车前进。
使用说明
1.在打开主要模型前,首先需要在 Syslab 加载对应的.jl文件,进行路径规划,文件为 maglev.jl
代码如下:
using TyControlSystems
using TyMath
using TyPlot
kc = -3005915.12 # 位移刚度系数
ki = 801.577 # 电流刚度系数
M = 1226.9 # 单电磁铁(模拟磁浮列车)质量1226.9Kg
# 磁悬浮系统状态空间矩阵定义
A = [0 1
-kc/M 0]
B = [0 -ki/M]'
C = [1 0]
D = 0
# 磁悬浮系统模型
G = ss(A, B, C, D)
M1 = ctrb(A, B) # 计算系统的能控性判别矩阵
N = obsv(A, C) # 计算系统的能观性判别矩阵
n_M1 = rank(M1) # 计算系统能控性判别矩阵的秩
n_N = rank(N) # 计算系统能观性判别矩阵的秩
# 系统重构
Ahat = [0 1 0
0 0 1
0 -kc/M 0]
Bhat = [0
B]
# 计算理想主导极点位置并分配系统所有极点位置
AllPoles = [-42.9+34.4im, -42.9-34.4im, -500]
Khat = place(Ahat, Bhat, AllPoles)
# 状态增益值分解
K = reshape(Khat[1][1:3], 1, 3)
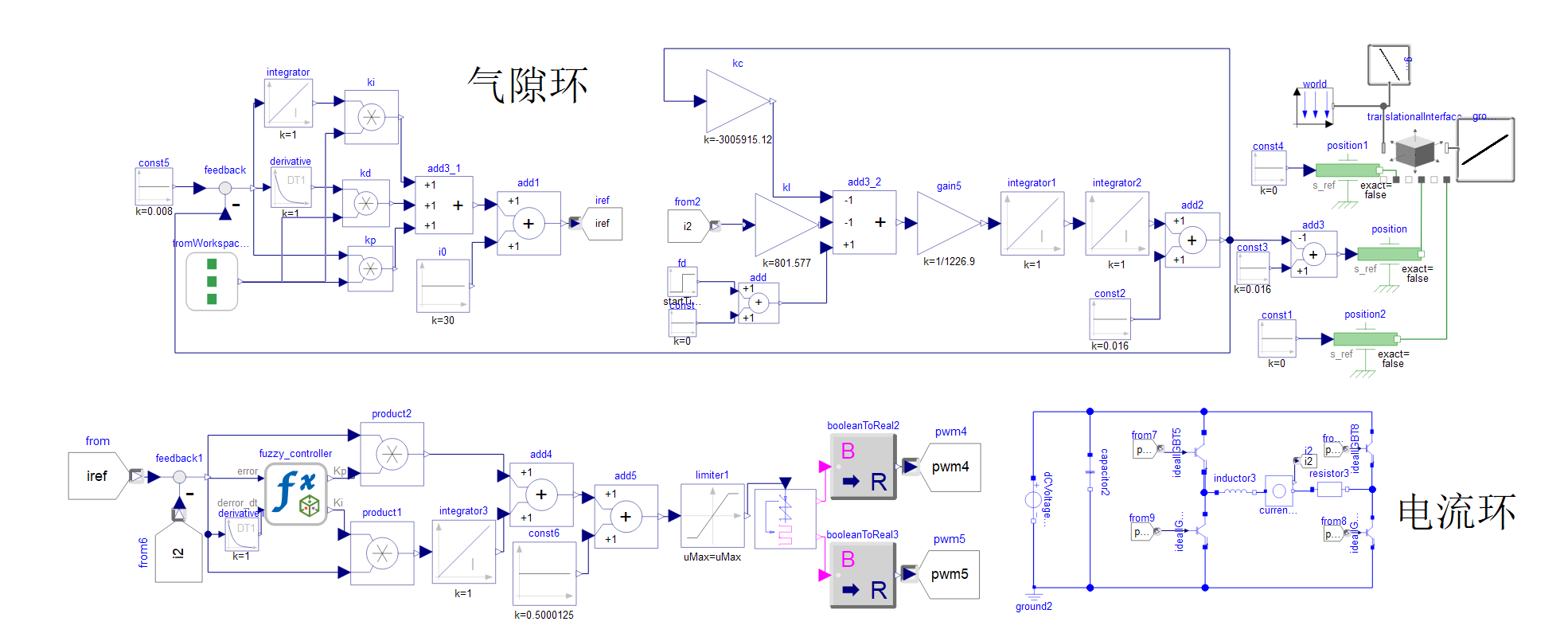
2.在Sysplorer加载 maglevmath.mo 和 Default 文件中的 package.mo 文件,模型如下图
仿真结果分析
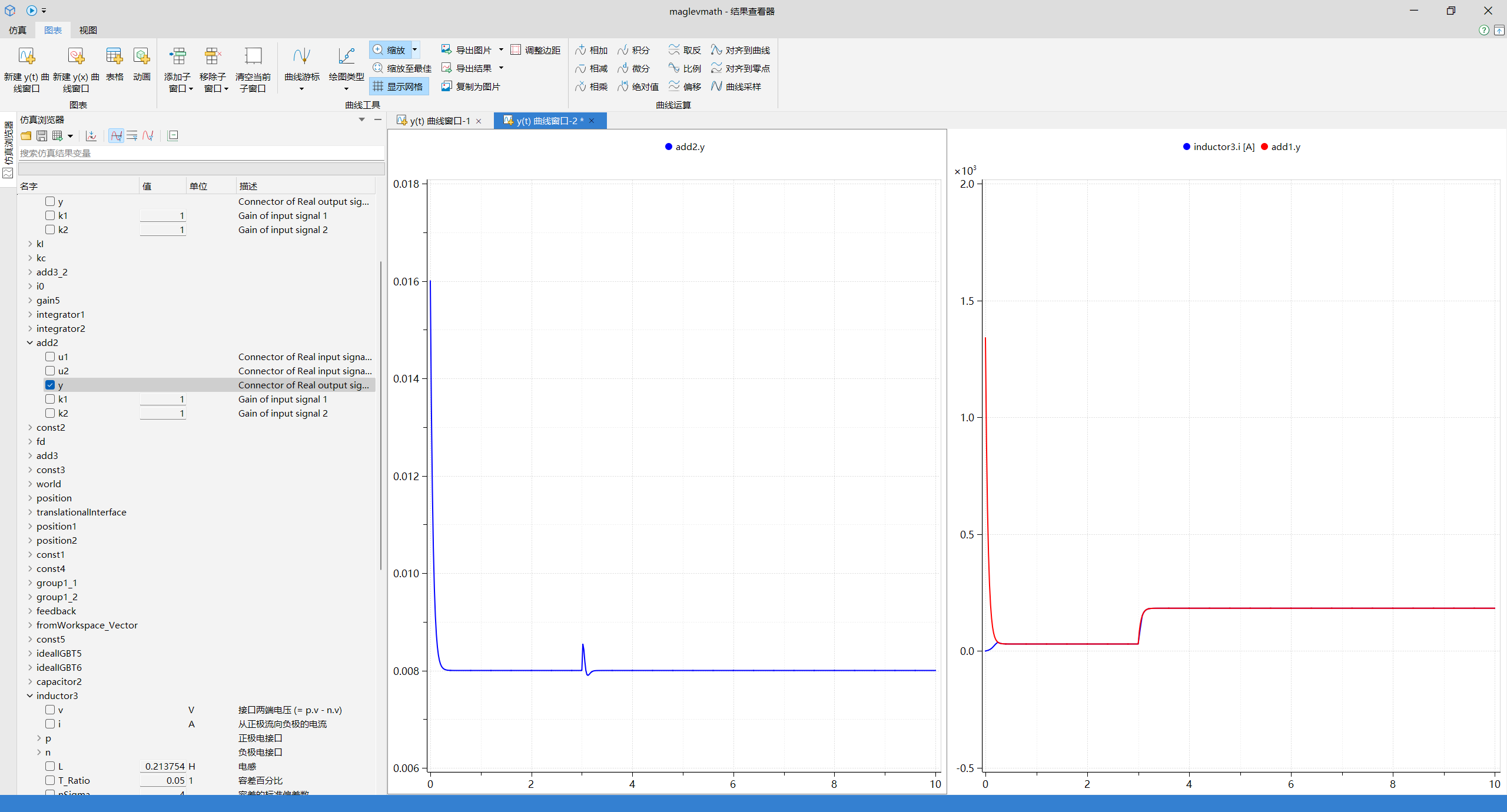
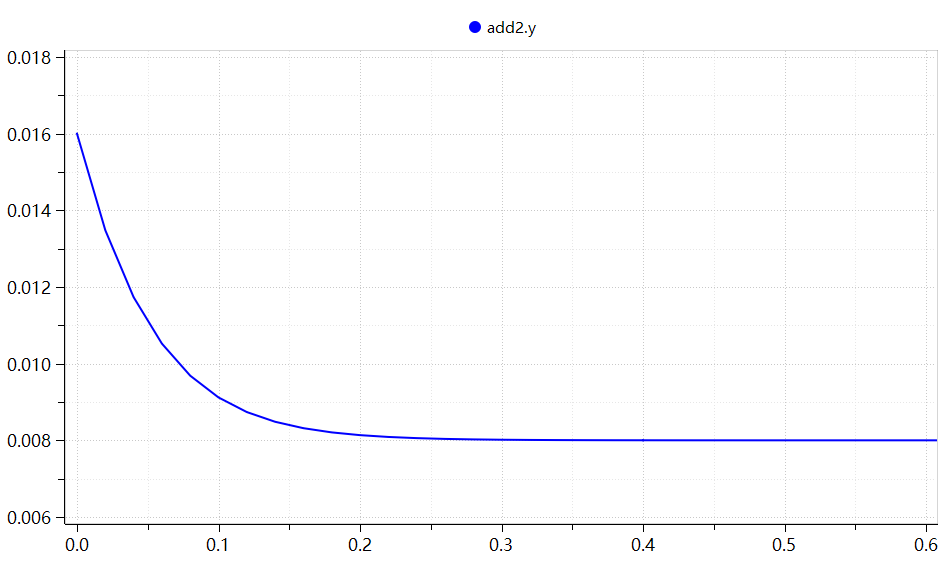
1.仿真在设定输入曲线和干扰的情况下,悬浮对象的位置从 16 mm 在 0.2s 内快速悬浮到了 8 mm,稳态误差为 0,满足指标要求,3s 前电磁铁实际电流为 30 A,3s 时由于磁浮系统受到方向向下的扰动电流大小由 30 A 上升到 183 A 以增加电磁吸力维持磁浮列车气隙平衡。
- 输入平衡位置和干扰信号 fd 曲线:

- 励磁线圈电流和气隙、电流双闭环系统位置响应曲线:
- 0-0.6 秒位置响应曲线:
2.在 Sysplorer 仿真界面,在仿真界面选择图表>动画,绘制磁悬浮列车和轨道的三维动画,单击回放控制>播放按钮,实现动画播放。
版本说明
V0.0.1,2025-09-03 14:55
- 初始版本
使用许可
本模型库版权由北京交通大学蓝桥杯参赛团队版权所有,未经原创作者许可,不得用于商业用途。
登录账号即可下载资源、参与讨论。