
'%3e%3cg%20id='编组'%20transform='translate(600.000000,%20248.000000)'%3e%3cmask%20id='mask-2'%20fill='white'%3e%3cuse%20xlink:href='%23path-1'%3e%3c/use%3e%3c/mask%3e%3cg%20id='Clip-2'%3e%3c/g%3e%3cpath%20d='M10.2668637,10.8710643%20C10.2668637,11.0790074%2010.1039142,11.2482675%209.89741264,11.2482675%20L9.64421692,11.2482675%20C9.44059555,11.2482675%209.27773336,11.0790074%209.27773336,10.8740056%20L9.27773336,3.32459352%20C9.27773336,3.11665045%209.44347575,2.95024251%209.64421692,2.95024251%20L9.89741264,2.95024251%20C10.101034,2.95024251%2010.2639835,3.11959178%2010.2639835,3.32459352%20L10.2668637,10.8710643%20Z%20M8.36706667,3.91580073%20L5.79234292,3.91580073%20C5.58872155,3.91580073%205.42577208,3.74645146%205.42577208,3.54144972%20C5.42577208,3.33350664%205.59160175,3.16709871%205.79234292,3.16709871%20L8.00049583,3.16709871%20C8.2041172,3.16709871%208.36706667,3.33644797%208.36706667,3.54144972%20L8.36706667,3.91580073%20Z%20M8.36706667,6.69375265%20L5.79234292,6.69375265%20C5.58872155,6.69375265%205.42577208,6.52431425%205.42577208,6.31940163%20C5.42577208,6.11145856%205.59160175,5.94505062%205.79234292,5.94505062%20L8.00049583,5.94505062%20C8.2041172,5.94505062%208.36706667,6.11439989%208.36706667,6.31940163%20L8.36706667,6.69375265%20Z%20M8.00049583,8.82995997%20L1.28003046,8.82995997%20C1.07640908,8.82995997%200.913459618,8.66052157%200.913459618,8.45551982%20C0.913459618,8.24757675%201.07928928,8.08116881%201.28003046,8.08116881%20L8.00049583,8.08116881%20C8.2041172,8.08116881%208.36706667,8.25060721%208.36706667,8.45551982%20C8.36706667,8.6634629%208.2041172,8.82995997%208.00049583,8.82995997%20L8.00049583,8.82995997%20Z%20M1.28003046,3.16709871%20L4.00024791,3.16709871%20C4.20386929,3.16709871%204.36681875,3.33644797%204.36681875,3.54144972%20L4.36681875,6.31940163%20C4.36681875,6.52743384%204.20098909,6.69375265%204.00024791,6.69375265%20L1.28003046,6.69375265%20C1.07640908,6.69375265%200.913459618,6.52431425%200.913459618,6.31940163%20L0.913459618,3.54144972%20C0.913459618,3.33350664%201.07928928,3.16709871%201.28003046,3.16709871%20L1.28003046,3.16709871%20Z%20M10.6363147,2.19859915%20L9.64709712,2.19859915%20C9.44347575,2.19859915%209.28061356,2.02916076%209.28061356,1.82424814%20L9.28061356,0.751643356%20C9.28061356,0.552613401%209.20206267,0.362496565%209.06529684,0.219886655%20C8.92861828,0.0802180743%208.73948518,0%208.54459169,0%20L0.736021876,0%20C0.541041102,0%200.354875483,0.0802180743%200.215229449,0.219886655%20C0.078550894,0.359466104%200,0.552613401%200,0.751643356%20L0,10.8740056%20C0,11.1740212%200.116342602,11.4593302%200.322844174,11.6702146%20C0.529433025,11.8811881%200.811692571,12%201.10259271,12%20L9.89741264,12%20C10.191193,12%2010.470485,11.8811881%2010.6770739,11.6702146%20C10.8835755,11.4593302%2010.9999596,11.1710799%2010.9999596,10.8740056%20L10.9999596,2.57286104%20C11.0029728,2.36491796%2010.8370559,2.19859915%2010.6363147,2.19859915%20L10.6363147,2.19859915%20Z'%20id='Fill-1'%20fill='%232EB0DF'%20mask='url(%23mask-2)'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 介绍
介绍'%20fill-rule='nonzero'%3e%3cg%20id='wenjian-2'%20transform='translate(266.000000,%20248.000000)'%3e%3cpath%20d='M0,13%20L0,0%20L5.92307692,0%20L5.92307692,4.875%20L11,4.875%20L11,13%20L0,13%20Z%20M5.5,6.09375%20C5.5,5.86938432%205.31058201,5.6875%205.07692308,5.6875%20L1.26923077,5.6875%20C1.03557184,5.6875%200.846153846,5.86938432%200.846153846,6.09375%20L0.846153846,7.3125%20C0.846153846,7.53686568%201.03557184,7.71875%201.26923077,7.71875%20L5.07692308,7.71875%20C5.31058201,7.71875%205.5,7.53686568%205.5,7.3125%20L5.5,6.09375%20Z%20M10.1538462,8.9375%20C10.1538462,8.71313432%209.96442816,8.53125%209.73076923,8.53125%20L1.26923077,8.53125%20C1.03557184,8.53125%200.846153846,8.71313432%200.846153846,8.9375%20L0.846153846,10.15625%20C0.846153846,10.3806157%201.03557184,10.5625%201.26923077,10.5625%20L9.73076923,10.5625%20C9.96442816,10.5625%2010.1538462,10.3806157%2010.1538462,10.15625%20L10.1538462,8.9375%20Z'%20id='形状'%20fill='%233CC451'%3e%3c/path%3e%3cpolygon%20id='路径'%20fill='%23B0E7B8'%20points='7%200%2011%204%207%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 文件
文件消防取水无人机
案例来源
本案例基于深圳城市安全监测预警科技有限公司的企业应用验证项目《基于 MWORKS 的取水无人机研制项目》。
简介
本案例介绍消防取水无人机系统。该系统构建无人机设计仿真的机械、电气、传感器和控制、环境等系统,并完成各系统间的连接,实现取水无人机路径规划和运动模拟。该模型基于 Syslab 和 Sysplorer 搭建双向融合模型,进行无人机运动路径规划和四旋翼无人机物理模型模拟,完成系统仿真。
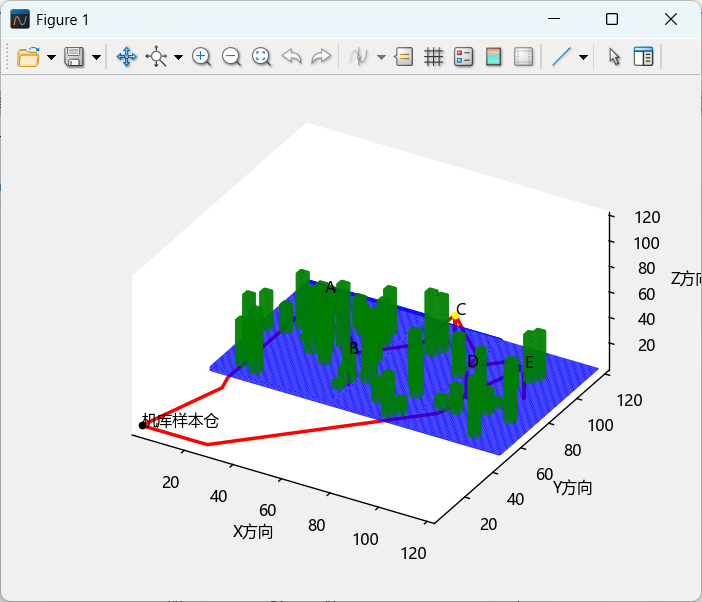
在 Sysplorer 中分别开发无人机的电气模型、传感器模型、环境模型、机械结构、无人机本体和控制模型,通过 Syslab 搭建三维路径规划,模型使用背景为:机库海拔为 100 m,飞行器从机库起飞,定巡航高度为 130 m,接收到任务后,按照预定 ABCDE 航点逐个飞行,到达指定航点后,下降高度至水平面,识别出水口,伸出取样管进行取样,取样完成后,返回到巡航高度,继续飞往下一个航点执行取水任务,直至完成所有的任务点,之后,再自动返回至机库。
使用说明
1.首先使用Syslab打开Sysplorer。
2.在打开主要模型前,首先需要在 Syslab 加载对应的 Astarpl4.jl文件,进行路径规划。
3.加载模型库,运行demo。
仿真结果分析
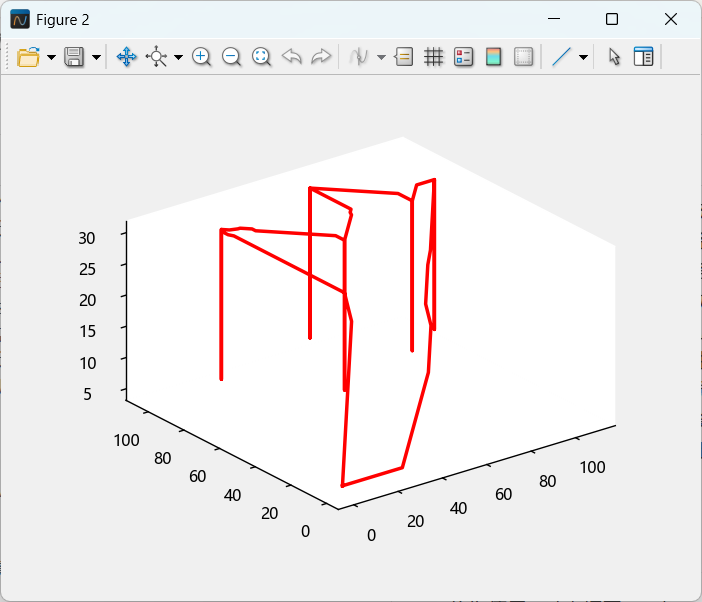
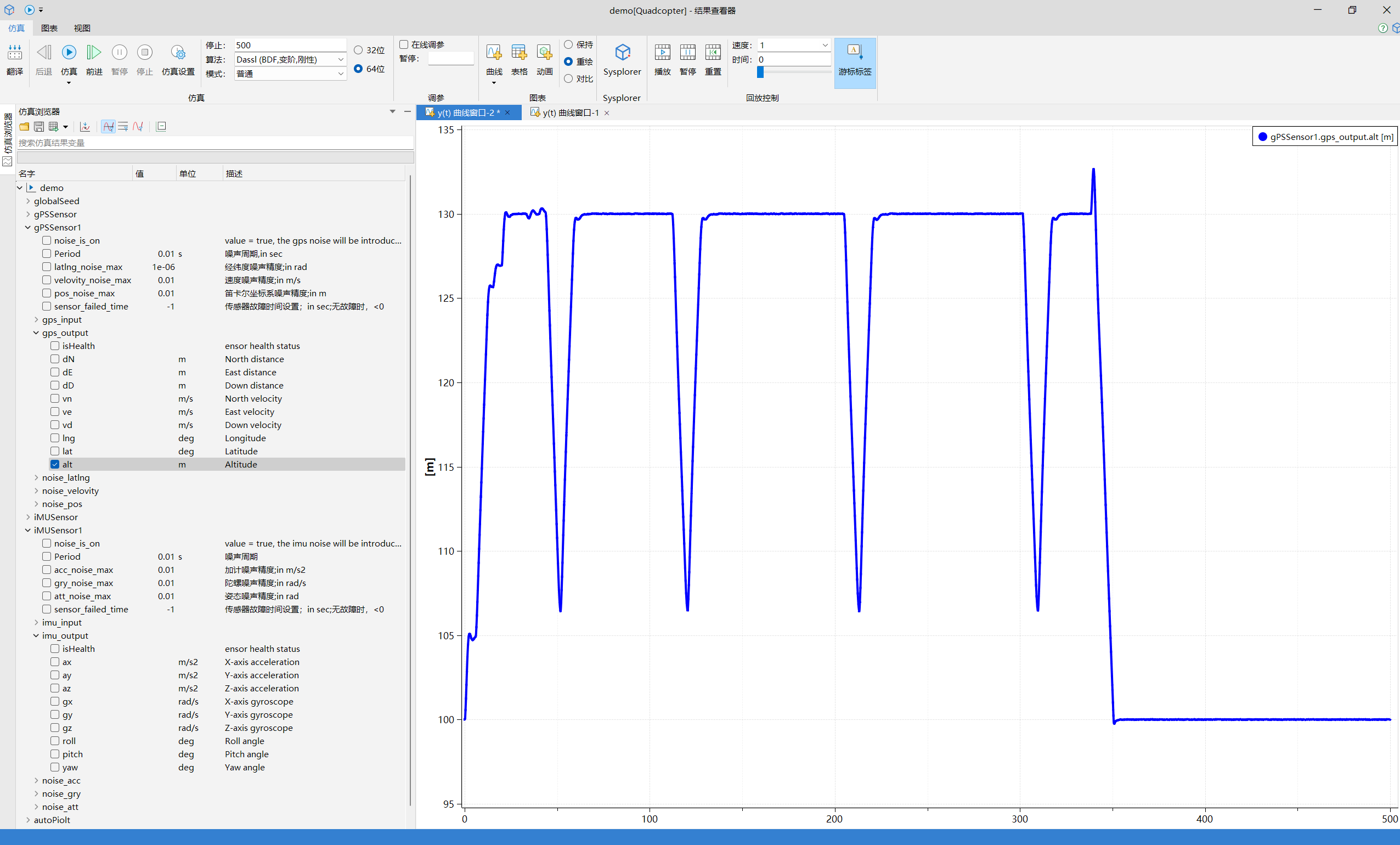
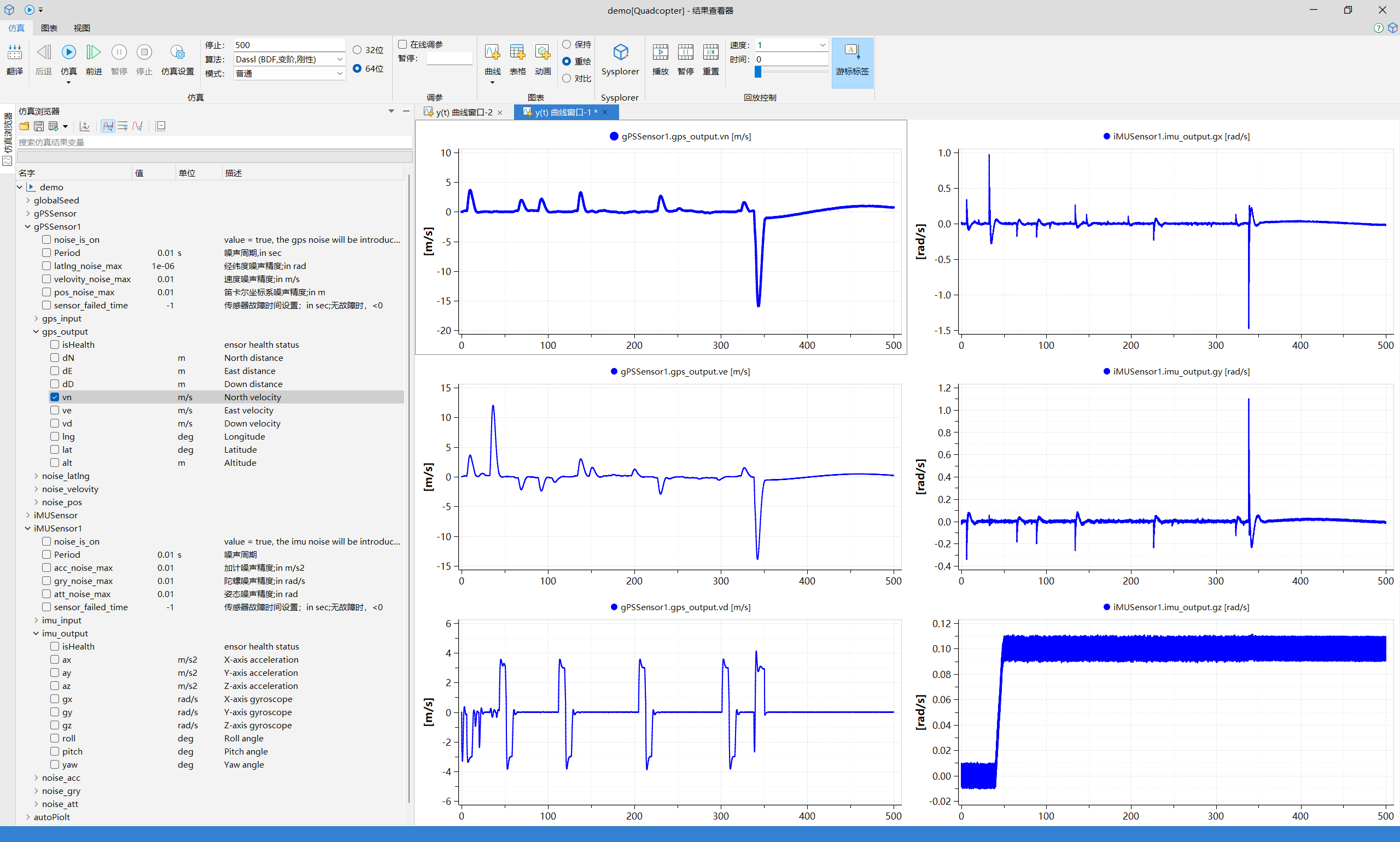
1.在 Syslab 中单击运行,待运行结束后,复杂三维环境地图和无人机平面路径图、无人机三维路径图分别如下所示:
版本说明
V0.0.1,2025-09-03 23:19
- 初始版本
使用许可
本模型库版权由深圳城市安全监测预警科技有限公司版权所有,未经许可,不得用于商业用途。
登录账号即可下载资源、参与讨论。