
'%3e%3cg%20id='编组'%20transform='translate(600.000000,%20248.000000)'%3e%3cmask%20id='mask-2'%20fill='white'%3e%3cuse%20xlink:href='%23path-1'%3e%3c/use%3e%3c/mask%3e%3cg%20id='Clip-2'%3e%3c/g%3e%3cpath%20d='M10.2668637,10.8710643%20C10.2668637,11.0790074%2010.1039142,11.2482675%209.89741264,11.2482675%20L9.64421692,11.2482675%20C9.44059555,11.2482675%209.27773336,11.0790074%209.27773336,10.8740056%20L9.27773336,3.32459352%20C9.27773336,3.11665045%209.44347575,2.95024251%209.64421692,2.95024251%20L9.89741264,2.95024251%20C10.101034,2.95024251%2010.2639835,3.11959178%2010.2639835,3.32459352%20L10.2668637,10.8710643%20Z%20M8.36706667,3.91580073%20L5.79234292,3.91580073%20C5.58872155,3.91580073%205.42577208,3.74645146%205.42577208,3.54144972%20C5.42577208,3.33350664%205.59160175,3.16709871%205.79234292,3.16709871%20L8.00049583,3.16709871%20C8.2041172,3.16709871%208.36706667,3.33644797%208.36706667,3.54144972%20L8.36706667,3.91580073%20Z%20M8.36706667,6.69375265%20L5.79234292,6.69375265%20C5.58872155,6.69375265%205.42577208,6.52431425%205.42577208,6.31940163%20C5.42577208,6.11145856%205.59160175,5.94505062%205.79234292,5.94505062%20L8.00049583,5.94505062%20C8.2041172,5.94505062%208.36706667,6.11439989%208.36706667,6.31940163%20L8.36706667,6.69375265%20Z%20M8.00049583,8.82995997%20L1.28003046,8.82995997%20C1.07640908,8.82995997%200.913459618,8.66052157%200.913459618,8.45551982%20C0.913459618,8.24757675%201.07928928,8.08116881%201.28003046,8.08116881%20L8.00049583,8.08116881%20C8.2041172,8.08116881%208.36706667,8.25060721%208.36706667,8.45551982%20C8.36706667,8.6634629%208.2041172,8.82995997%208.00049583,8.82995997%20L8.00049583,8.82995997%20Z%20M1.28003046,3.16709871%20L4.00024791,3.16709871%20C4.20386929,3.16709871%204.36681875,3.33644797%204.36681875,3.54144972%20L4.36681875,6.31940163%20C4.36681875,6.52743384%204.20098909,6.69375265%204.00024791,6.69375265%20L1.28003046,6.69375265%20C1.07640908,6.69375265%200.913459618,6.52431425%200.913459618,6.31940163%20L0.913459618,3.54144972%20C0.913459618,3.33350664%201.07928928,3.16709871%201.28003046,3.16709871%20L1.28003046,3.16709871%20Z%20M10.6363147,2.19859915%20L9.64709712,2.19859915%20C9.44347575,2.19859915%209.28061356,2.02916076%209.28061356,1.82424814%20L9.28061356,0.751643356%20C9.28061356,0.552613401%209.20206267,0.362496565%209.06529684,0.219886655%20C8.92861828,0.0802180743%208.73948518,0%208.54459169,0%20L0.736021876,0%20C0.541041102,0%200.354875483,0.0802180743%200.215229449,0.219886655%20C0.078550894,0.359466104%200,0.552613401%200,0.751643356%20L0,10.8740056%20C0,11.1740212%200.116342602,11.4593302%200.322844174,11.6702146%20C0.529433025,11.8811881%200.811692571,12%201.10259271,12%20L9.89741264,12%20C10.191193,12%2010.470485,11.8811881%2010.6770739,11.6702146%20C10.8835755,11.4593302%2010.9999596,11.1710799%2010.9999596,10.8740056%20L10.9999596,2.57286104%20C11.0029728,2.36491796%2010.8370559,2.19859915%2010.6363147,2.19859915%20L10.6363147,2.19859915%20Z'%20id='Fill-1'%20fill='%232EB0DF'%20mask='url(%23mask-2)'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 介绍
介绍'%20fill-rule='nonzero'%3e%3cg%20id='wenjian-2'%20transform='translate(266.000000,%20248.000000)'%3e%3cpath%20d='M0,13%20L0,0%20L5.92307692,0%20L5.92307692,4.875%20L11,4.875%20L11,13%20L0,13%20Z%20M5.5,6.09375%20C5.5,5.86938432%205.31058201,5.6875%205.07692308,5.6875%20L1.26923077,5.6875%20C1.03557184,5.6875%200.846153846,5.86938432%200.846153846,6.09375%20L0.846153846,7.3125%20C0.846153846,7.53686568%201.03557184,7.71875%201.26923077,7.71875%20L5.07692308,7.71875%20C5.31058201,7.71875%205.5,7.53686568%205.5,7.3125%20L5.5,6.09375%20Z%20M10.1538462,8.9375%20C10.1538462,8.71313432%209.96442816,8.53125%209.73076923,8.53125%20L1.26923077,8.53125%20C1.03557184,8.53125%200.846153846,8.71313432%200.846153846,8.9375%20L0.846153846,10.15625%20C0.846153846,10.3806157%201.03557184,10.5625%201.26923077,10.5625%20L9.73076923,10.5625%20C9.96442816,10.5625%2010.1538462,10.3806157%2010.1538462,10.15625%20L10.1538462,8.9375%20Z'%20id='形状'%20fill='%233CC451'%3e%3c/path%3e%3cpolygon%20id='路径'%20fill='%23B0E7B8'%20points='7%200%2011%204%207%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 文件
文件大惯量强非线性伺服控制系统
获奖团队介绍
学校:南京理工大学
指导老师:颜建虎、单梁
团队成员:张威航、段智勇、索梓铜、苏毅祥
简介
舰炮是舰船防空、反导和对海、对岸作战的核心武器,其伺服控制系统需实现炮身的精准俯仰瞄准,为火力打击提供精度保障。本案例以舰炮伺服控制为背景,基于 SolidWorks 与 MWORKS 软件联合仿真,搭建了大惯量强非线性舰炮伺服控制系统的数字样机,先在 SolidWorks 中完成舰炮俯仰系统的三维建模,再在 MWORKS 的 CAD 工具箱设定组件运动关系并导出数字样机,在 MWORKS/Sysplorer 中设计了三环伺服控制结构,电流环和速度环采用 PI 控制器且为电流环引入 SPWM 零序注入法,位置环设计了基于 P 型学习观测器的模糊 ADRC 控制器,最终实现了舰炮伺服控制系统的多学科联合仿真,模拟了舰炮身管在多种角度控制场景下的精准俯仰运动过程。
结果分析
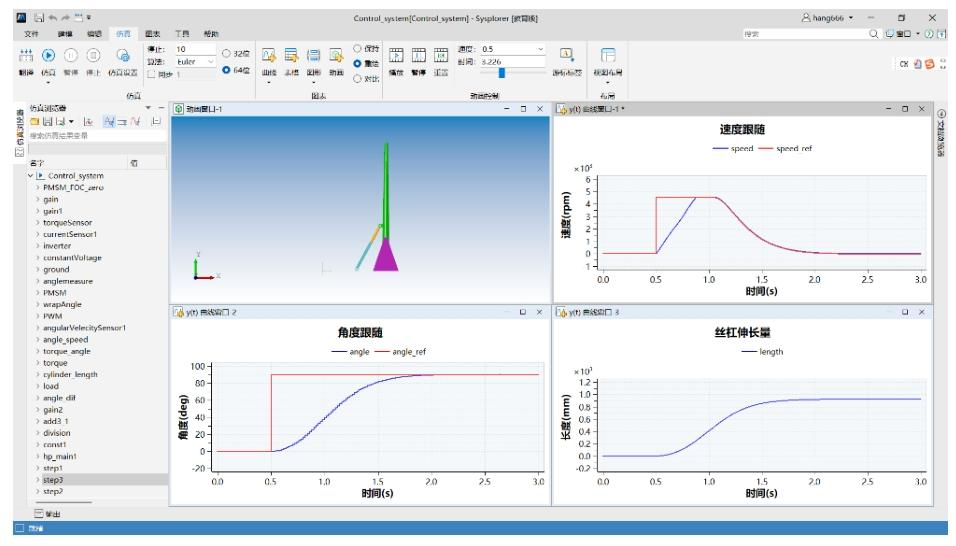
1.舰炮身管按给定的抬升至90°
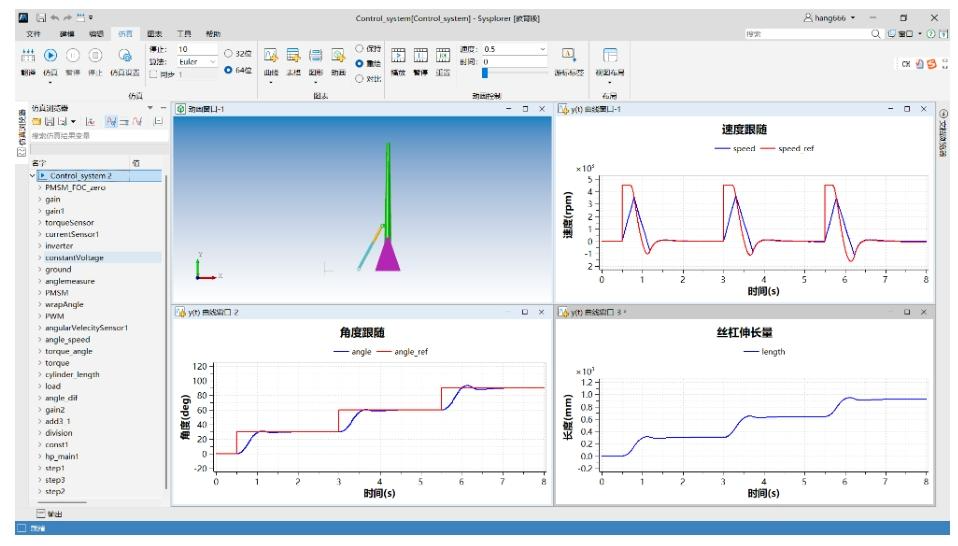
2.舰炮身管按照每次抬升 30° 的指令,三次后抬升至 90°
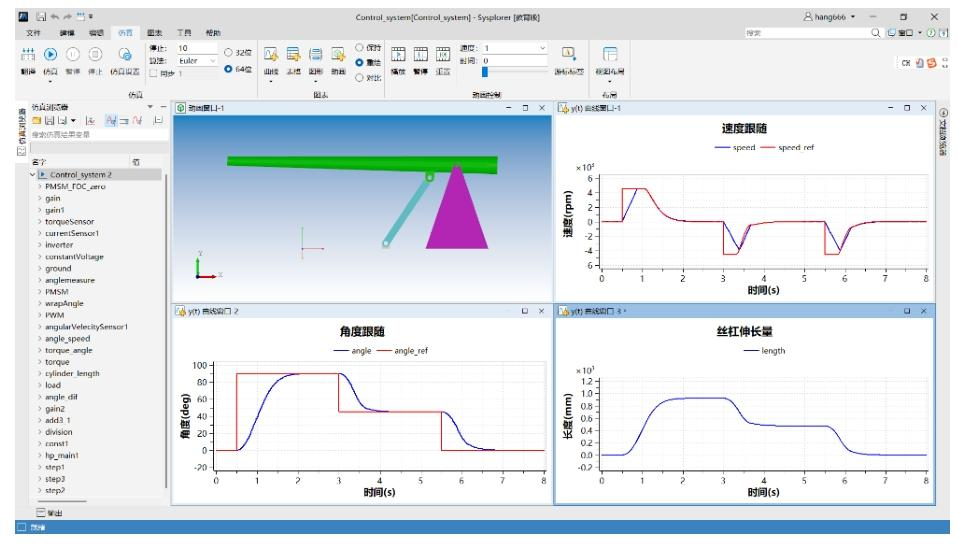
3.舰炮身管从初始位置90°,分两次,按照一次下降 45° 的指令降至 0。
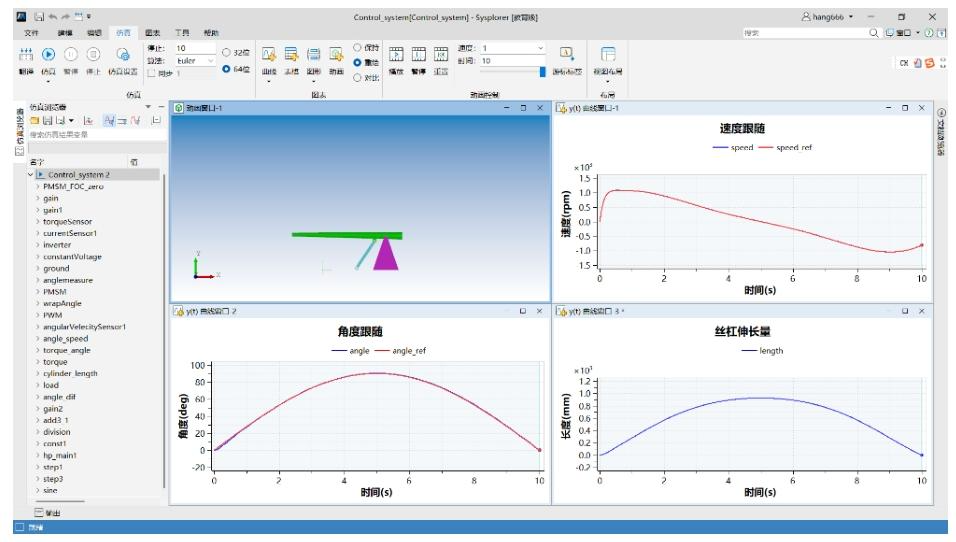
4.给定 f=1/20 Hz,幅值为 90 的正弦波指令
版本说明
V0.0.1,2026-02-26 14:06
- 初始版本
使用许可
本模型库版权由MoHub版权所有,未经许可,不得用于商业用途。
登录账号即可下载资源、参与讨论。