
'%3e%3cg%20id='编组'%20transform='translate(600.000000,%20248.000000)'%3e%3cmask%20id='mask-2'%20fill='white'%3e%3cuse%20xlink:href='%23path-1'%3e%3c/use%3e%3c/mask%3e%3cg%20id='Clip-2'%3e%3c/g%3e%3cpath%20d='M10.2668637,10.8710643%20C10.2668637,11.0790074%2010.1039142,11.2482675%209.89741264,11.2482675%20L9.64421692,11.2482675%20C9.44059555,11.2482675%209.27773336,11.0790074%209.27773336,10.8740056%20L9.27773336,3.32459352%20C9.27773336,3.11665045%209.44347575,2.95024251%209.64421692,2.95024251%20L9.89741264,2.95024251%20C10.101034,2.95024251%2010.2639835,3.11959178%2010.2639835,3.32459352%20L10.2668637,10.8710643%20Z%20M8.36706667,3.91580073%20L5.79234292,3.91580073%20C5.58872155,3.91580073%205.42577208,3.74645146%205.42577208,3.54144972%20C5.42577208,3.33350664%205.59160175,3.16709871%205.79234292,3.16709871%20L8.00049583,3.16709871%20C8.2041172,3.16709871%208.36706667,3.33644797%208.36706667,3.54144972%20L8.36706667,3.91580073%20Z%20M8.36706667,6.69375265%20L5.79234292,6.69375265%20C5.58872155,6.69375265%205.42577208,6.52431425%205.42577208,6.31940163%20C5.42577208,6.11145856%205.59160175,5.94505062%205.79234292,5.94505062%20L8.00049583,5.94505062%20C8.2041172,5.94505062%208.36706667,6.11439989%208.36706667,6.31940163%20L8.36706667,6.69375265%20Z%20M8.00049583,8.82995997%20L1.28003046,8.82995997%20C1.07640908,8.82995997%200.913459618,8.66052157%200.913459618,8.45551982%20C0.913459618,8.24757675%201.07928928,8.08116881%201.28003046,8.08116881%20L8.00049583,8.08116881%20C8.2041172,8.08116881%208.36706667,8.25060721%208.36706667,8.45551982%20C8.36706667,8.6634629%208.2041172,8.82995997%208.00049583,8.82995997%20L8.00049583,8.82995997%20Z%20M1.28003046,3.16709871%20L4.00024791,3.16709871%20C4.20386929,3.16709871%204.36681875,3.33644797%204.36681875,3.54144972%20L4.36681875,6.31940163%20C4.36681875,6.52743384%204.20098909,6.69375265%204.00024791,6.69375265%20L1.28003046,6.69375265%20C1.07640908,6.69375265%200.913459618,6.52431425%200.913459618,6.31940163%20L0.913459618,3.54144972%20C0.913459618,3.33350664%201.07928928,3.16709871%201.28003046,3.16709871%20L1.28003046,3.16709871%20Z%20M10.6363147,2.19859915%20L9.64709712,2.19859915%20C9.44347575,2.19859915%209.28061356,2.02916076%209.28061356,1.82424814%20L9.28061356,0.751643356%20C9.28061356,0.552613401%209.20206267,0.362496565%209.06529684,0.219886655%20C8.92861828,0.0802180743%208.73948518,0%208.54459169,0%20L0.736021876,0%20C0.541041102,0%200.354875483,0.0802180743%200.215229449,0.219886655%20C0.078550894,0.359466104%200,0.552613401%200,0.751643356%20L0,10.8740056%20C0,11.1740212%200.116342602,11.4593302%200.322844174,11.6702146%20C0.529433025,11.8811881%200.811692571,12%201.10259271,12%20L9.89741264,12%20C10.191193,12%2010.470485,11.8811881%2010.6770739,11.6702146%20C10.8835755,11.4593302%2010.9999596,11.1710799%2010.9999596,10.8740056%20L10.9999596,2.57286104%20C11.0029728,2.36491796%2010.8370559,2.19859915%2010.6363147,2.19859915%20L10.6363147,2.19859915%20Z'%20id='Fill-1'%20fill='%232EB0DF'%20mask='url(%23mask-2)'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 介绍
介绍'%20fill-rule='nonzero'%3e%3cg%20id='wenjian-2'%20transform='translate(266.000000,%20248.000000)'%3e%3cpath%20d='M0,13%20L0,0%20L5.92307692,0%20L5.92307692,4.875%20L11,4.875%20L11,13%20L0,13%20Z%20M5.5,6.09375%20C5.5,5.86938432%205.31058201,5.6875%205.07692308,5.6875%20L1.26923077,5.6875%20C1.03557184,5.6875%200.846153846,5.86938432%200.846153846,6.09375%20L0.846153846,7.3125%20C0.846153846,7.53686568%201.03557184,7.71875%201.26923077,7.71875%20L5.07692308,7.71875%20C5.31058201,7.71875%205.5,7.53686568%205.5,7.3125%20L5.5,6.09375%20Z%20M10.1538462,8.9375%20C10.1538462,8.71313432%209.96442816,8.53125%209.73076923,8.53125%20L1.26923077,8.53125%20C1.03557184,8.53125%200.846153846,8.71313432%200.846153846,8.9375%20L0.846153846,10.15625%20C0.846153846,10.3806157%201.03557184,10.5625%201.26923077,10.5625%20L9.73076923,10.5625%20C9.96442816,10.5625%2010.1538462,10.3806157%2010.1538462,10.15625%20L10.1538462,8.9375%20Z'%20id='形状'%20fill='%233CC451'%3e%3c/path%3e%3cpolygon%20id='路径'%20fill='%23B0E7B8'%20points='7%200%2011%204%207%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 文件
文件汽车稳态响应特性仿真
简介
汽车稳态响应特性是指汽车稳态状况下的运动响应,其评价指标主要有汽车稳态横摆角速度增益、汽车稳定性因数、前后轮侧偏角之差、转向半径比值、静态储备系数。
使用说明
一、实验目的
1.建立汽车稳态响应特性评价指标模型
2.绘制汽车横摆角速度增益与速度曲线
3.绘制汽车前后轮侧偏角之差与侧向加速度曲线
4.绘制汽车转向半径比值与速度平方曲线
5.计算汽车稳定性因数和静态储备系数
二、仿真数据
汽车稳态响应特性仿真所需参数见表6-8-1。
| 汽车质量/kg | 汽车转动惯量/kg·m² | 汽车质心至前轴距离/m |
|---|---|---|
| 3018 | 10437 | 1.84 |
| 汽车质心至后轴距离/m | 前轮综合侧偏刚度/(N/rad) | 后轮综合侧偏刚度/(N/rad) |
| 1.88 | -23147 | -38318 |
三、实验步骤
汽车稳态响应特性评价指标主要有汽车稳态横摆角速度增益、汽车稳定性因数、前后轮侧偏角之差、转向半径比值和静态储备系数。
汽车稳态横摆角速度增益是指稳态横摆角速度与前轮转角之比,也称转向灵敏度。稳态横摆角速度增益不能太大,以免由于驾驶员无意识轻微转动转向盘而引起汽车很大的响应。稳态横摆角速度增益又不能太小,否则操纵困难。
1.建立汽车稳态响应特性评价指标模型
原理参考教材第六章实例八
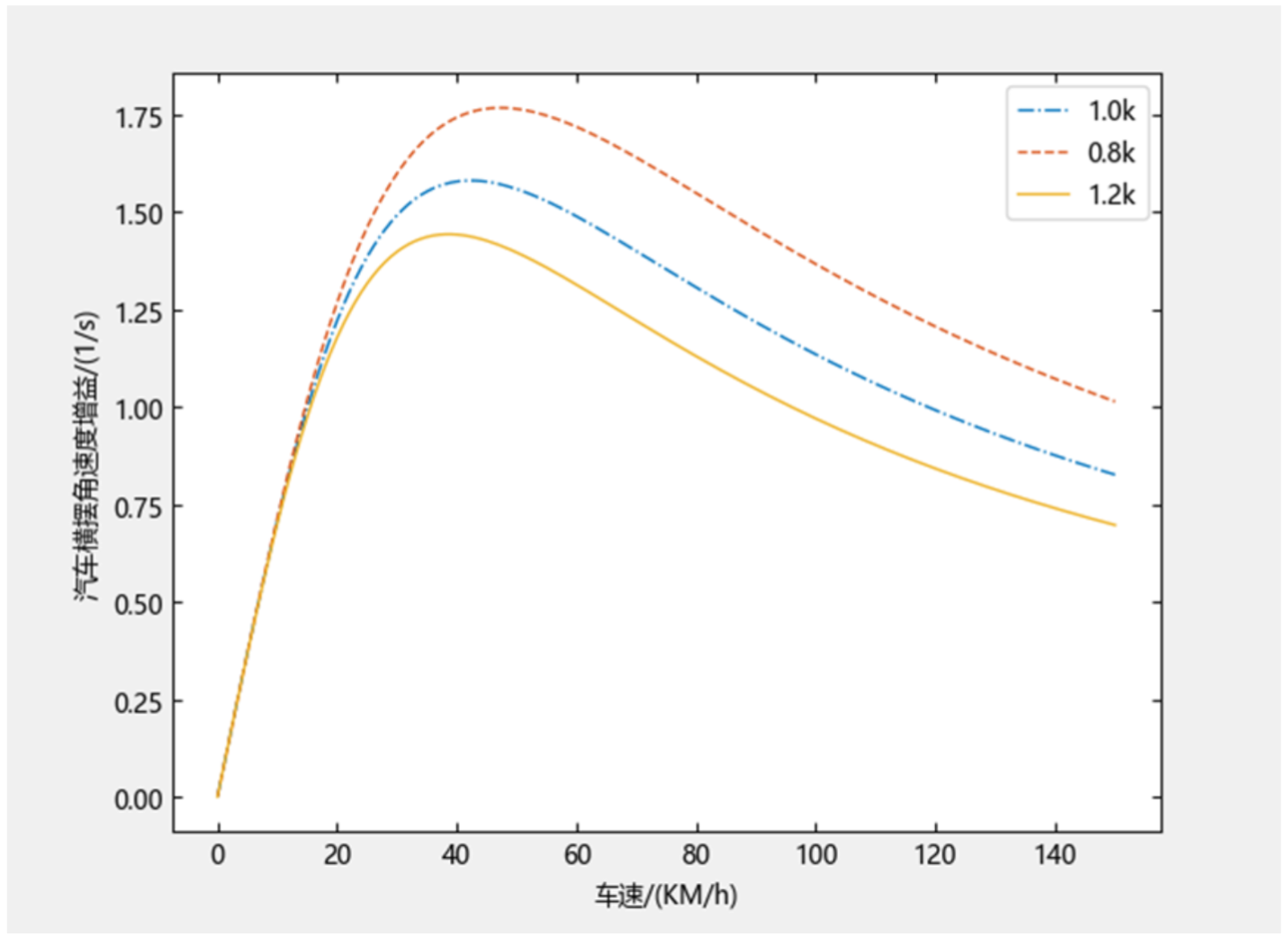
2.绘制汽车横摆角速度增益与速度曲线
根据汽车稳态横摆角速度增益模型,编写绘制汽车横摆角速度增益与速度曲线的MWORKS程序如下。
m = 3018 # 车辆质量
I = 10437 # 惯性力
a = 1.84 # 前悬架弹簧刚度
b = 1.88 # 后悬架弹簧刚度
k1 = -23147 # 前悬架阻尼系数
k2 = -38318 # 后悬架阻尼系数
# 计算悬架刚度
k = m ./ (a + b) .^ 2 .* (a ./ k2 - b ./ k1)
u = 0:1:150 # 速度范围
# 计算不同参数下的垂直振动频率
w1 = u ./ 3.6 ./ (a + b) ./ (1 .+ k .* u .* u ./ 3.6 ./ 3.6)
w2 = u ./ 3.6 ./ (a + b) ./ (1 .+ 0.8 * k .* u .* u ./ 3.6 ./ 3.6)
w3 = u ./ 3.6 ./ (a + b) ./ (1 .+ 1.2 * k .* u .* u ./ 3.6 ./ 3.6)
# 绘制曲线
plot(u, w1,linestyle="-.");hold(true)
plot(u, w2,linestyle="--");hold(true)
plot(u, w3)
xlabel("车速/(KM/h)")
ylabel("汽车横摆角速度增益/(1/s)")
legend(["1.0k", "0.8k", "1.2k"])
在MWORKS 编辑器中输入这些程序,点击运行按钮,就会得到汽车横摆角速度增益与速度曲线,如图6-8-6所示。随着车速的增加,汽车横摆角速度增益增加,达到某一车速时,汽车横摆角速度增益达到最大值;再继续增加车速,汽车横摆角速度增益下降。最大横摆角速度增益所对应的车速称为特征车速。该车具有不足转向特性。汽车稳定性因数越大,汽车横摆角速度增益越小,不足转向量越大。
3.绘制汽车前后轮侧偏角之差与侧向加速度曲线
根据汽车前后轮侧偏角之差模型,编写绘制汽车前后轮侧偏角之差与侧向加速度曲线的MWORKS程序如下。
m = 3018 # 车辆质量
I = 10437 # 惯性力
a = 1.84 # 前悬架弹簧刚度
b = 1.88 # 后悬架弹簧刚度
k1 = -23147 # 前悬架阻尼系数
k2 = -38318 # 后悬架阻尼系数
# 计算悬架刚度
k = m ./ (a + b) .^ 2 .* (a ./ k2 - b ./ k1)
ay = 0:0.05:1.5 # 纵向加速度范围
# 计算不同参数下的纵向加速度对应的悬架力
a1_a2 = (a + b) .* k .* ay .* 9.8
a11_a22 = (a + b) .* 0.8 .* k .* ay .* 9.8
a111_a222 = (a + b) .* 1.2 .* k .* ay .* 9.8
# 绘制曲线
plot(ay, a1_a2,linestyle="-.");hold(true)
plot(ay, a11_a22,linestyle="--");hold(true)
plot(ay, a111_a222)
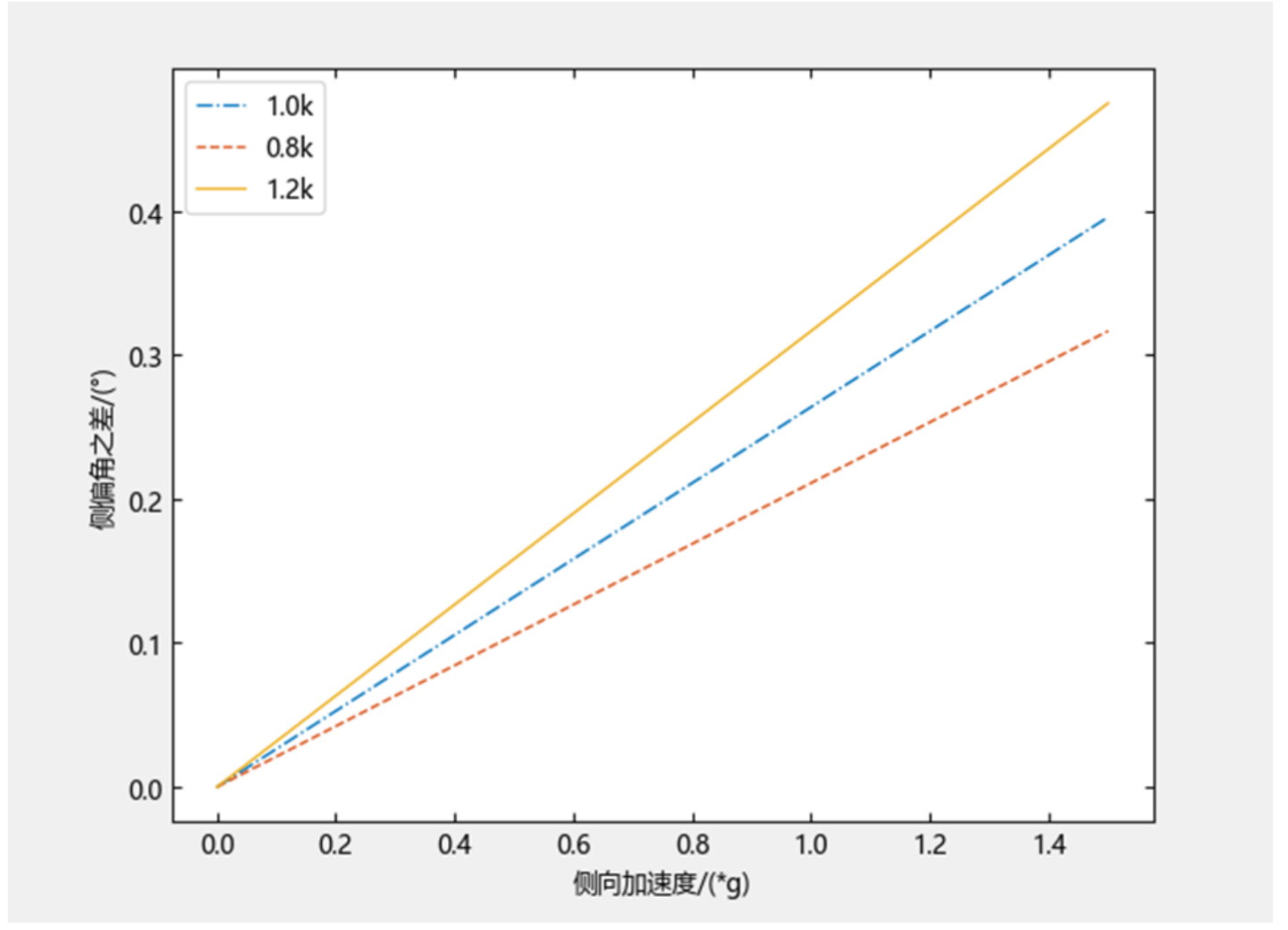
xlabel("侧向加速度/(*g)")
ylabel("侧偏角之差/(°)")
legend(["1.0k", "0.8k", "1.2k"])
在MWORKS编辑器中输入这些程序,点击运行按钮,就会得到汽车前后侧偏角之差与侧向加速度曲线,如图6-8-7所示。随着侧向加速度的增加,汽车前后侧偏角之差增加。该车具有不足转向特性。汽车稳定性因数越大,汽车前后侧偏角之差越大,不足转向量越大。
4.绘制汽车转向半径比值与速度平方曲线
根据汽车转向半径比值模型,编写绘制汽车转向半径比值与速度平方曲线的MWORKS程序如下。
m = 3018 # 车辆质量
I = 10437 # 惯性力
a = 1.84 # 前悬架弹簧刚度
b = 1.88 # 后悬架弹簧刚度
k1 = -23147 # 前悬架阻尼系数
k2 = -38318 # 后悬架阻尼系数
# 计算悬架刚度
k = m ./ (a + b) .^ 2 .* (a ./ k2 - b ./ k1)
u = 0:1:20 # 纵向速度范围
# 计算不同参数下的悬架力与纵向速度平方的关系
R1 = 1 .+ k .* u.^2
R2 = 1 .+ 0.8 .* k .* u.^2
R3 = 1 .+ 1.2 .* k .* u.^2
axis([0 300 0 3]) # 设置坐标轴范围
# 绘制曲线
plot(u.^2, R1,linestyle="-.");hold(true)
plot(u.^2, R2,linestyle="--");hold(true)
plot(u.^2, R3)
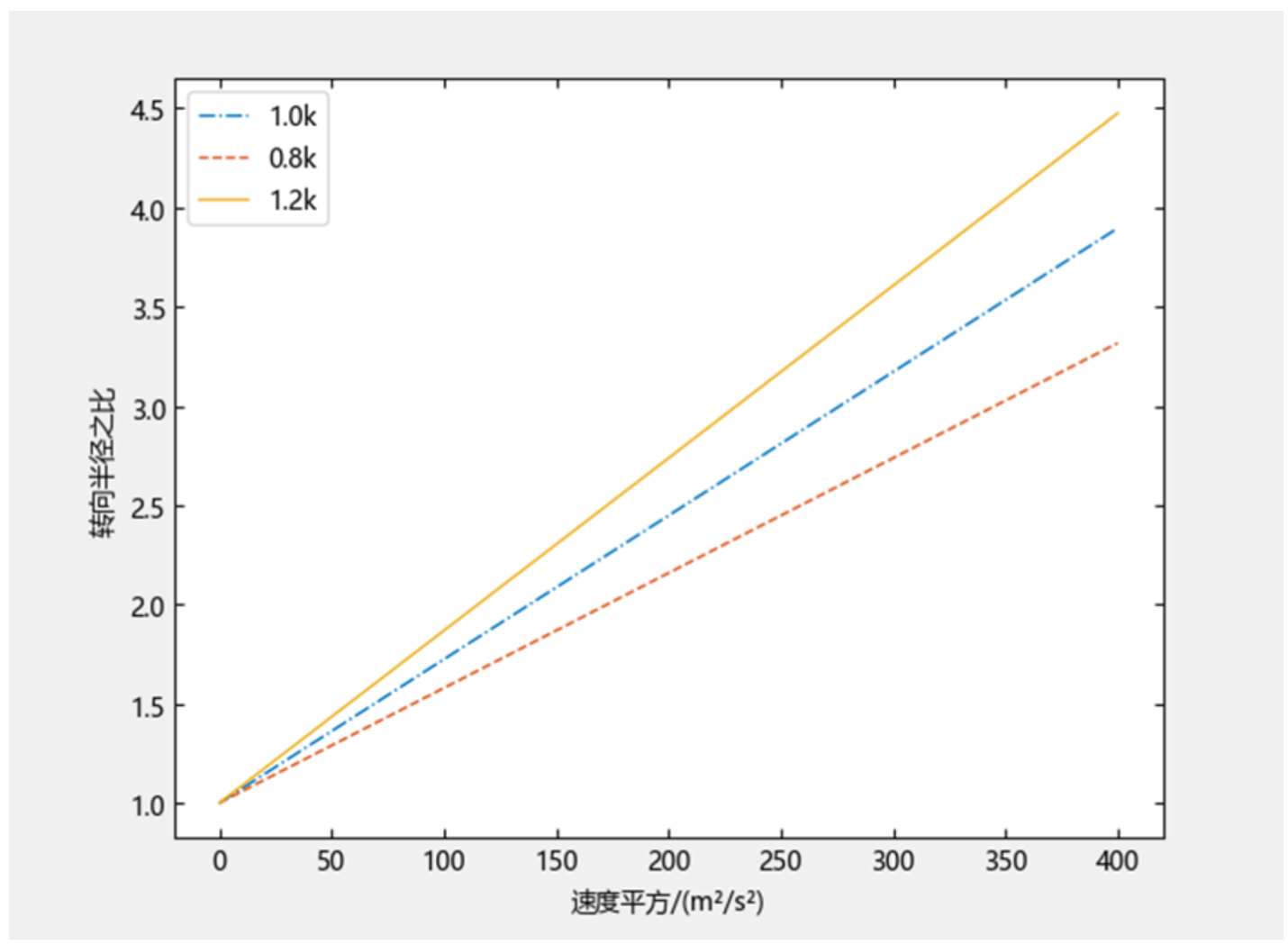
xlabel("速度平方/(m²/s²)")
ylabel("转向半径之比")
legend(["1.0k", "0.8k", "1.2k"])
在MWORKS 编辑器中输入这些程序,点击运行按钮,就会得到汽车转向半径比值与速度平方曲线,如图6-8-8所示。随着速度的增加,转向半径比值增大。该车具有不足转向特性。汽车稳定性因数越大,汽车转向半径比值越大,不足转向量越大。
5.计算汽车稳定性因数和静态储备系数
根据汽车汽车稳定性因数和静态储备系数模型,编写计算汽车稳定性因数和静态储备系数的MWORKS程序如下。
m = 3018 # 车辆质量
I = 10437 # 惯性力
a = 1.84 # 前悬架弹簧刚度
b = 1.88 # 后悬架弹簧刚度
k1 = -23147 # 前悬架阻尼系数
k2 = -38318 # 后悬架阻尼系数
# 计算悬架刚度
k = m / (a + b)^2 * (a / k2 - b / k1)
# 计算汽车稳定性因数K
K = k
# 计算汽车静态储备系数S.M.
SM = k2 / (k1 + k2) - a / (a + b)
print("汽车稳定性因数K=")
println(K)
print("汽车静态储备系数S.M.=")
println(SM)
在MWORKS编辑器中输入这些程序,点击运行按钮,就会得到汽车稳定性因数和汽车静态储备系数。
通过程序计算得出K = 0.0072。K > 0,该车具有不足转向特性。
由程序得出S.M. = 0.1288。S.M. > 0,该车具有不足转向特性。
通过5种计算,都表明该车具有不足转向特性。