'%3e%3cg%20id='编组'%20transform='translate(600.000000,%20248.000000)'%3e%3cmask%20id='mask-2'%20fill='white'%3e%3cuse%20xlink:href='%23path-1'%3e%3c/use%3e%3c/mask%3e%3cg%20id='Clip-2'%3e%3c/g%3e%3cpath%20d='M10.2668637,10.8710643%20C10.2668637,11.0790074%2010.1039142,11.2482675%209.89741264,11.2482675%20L9.64421692,11.2482675%20C9.44059555,11.2482675%209.27773336,11.0790074%209.27773336,10.8740056%20L9.27773336,3.32459352%20C9.27773336,3.11665045%209.44347575,2.95024251%209.64421692,2.95024251%20L9.89741264,2.95024251%20C10.101034,2.95024251%2010.2639835,3.11959178%2010.2639835,3.32459352%20L10.2668637,10.8710643%20Z%20M8.36706667,3.91580073%20L5.79234292,3.91580073%20C5.58872155,3.91580073%205.42577208,3.74645146%205.42577208,3.54144972%20C5.42577208,3.33350664%205.59160175,3.16709871%205.79234292,3.16709871%20L8.00049583,3.16709871%20C8.2041172,3.16709871%208.36706667,3.33644797%208.36706667,3.54144972%20L8.36706667,3.91580073%20Z%20M8.36706667,6.69375265%20L5.79234292,6.69375265%20C5.58872155,6.69375265%205.42577208,6.52431425%205.42577208,6.31940163%20C5.42577208,6.11145856%205.59160175,5.94505062%205.79234292,5.94505062%20L8.00049583,5.94505062%20C8.2041172,5.94505062%208.36706667,6.11439989%208.36706667,6.31940163%20L8.36706667,6.69375265%20Z%20M8.00049583,8.82995997%20L1.28003046,8.82995997%20C1.07640908,8.82995997%200.913459618,8.66052157%200.913459618,8.45551982%20C0.913459618,8.24757675%201.07928928,8.08116881%201.28003046,8.08116881%20L8.00049583,8.08116881%20C8.2041172,8.08116881%208.36706667,8.25060721%208.36706667,8.45551982%20C8.36706667,8.6634629%208.2041172,8.82995997%208.00049583,8.82995997%20L8.00049583,8.82995997%20Z%20M1.28003046,3.16709871%20L4.00024791,3.16709871%20C4.20386929,3.16709871%204.36681875,3.33644797%204.36681875,3.54144972%20L4.36681875,6.31940163%20C4.36681875,6.52743384%204.20098909,6.69375265%204.00024791,6.69375265%20L1.28003046,6.69375265%20C1.07640908,6.69375265%200.913459618,6.52431425%200.913459618,6.31940163%20L0.913459618,3.54144972%20C0.913459618,3.33350664%201.07928928,3.16709871%201.28003046,3.16709871%20L1.28003046,3.16709871%20Z%20M10.6363147,2.19859915%20L9.64709712,2.19859915%20C9.44347575,2.19859915%209.28061356,2.02916076%209.28061356,1.82424814%20L9.28061356,0.751643356%20C9.28061356,0.552613401%209.20206267,0.362496565%209.06529684,0.219886655%20C8.92861828,0.0802180743%208.73948518,0%208.54459169,0%20L0.736021876,0%20C0.541041102,0%200.354875483,0.0802180743%200.215229449,0.219886655%20C0.078550894,0.359466104%200,0.552613401%200,0.751643356%20L0,10.8740056%20C0,11.1740212%200.116342602,11.4593302%200.322844174,11.6702146%20C0.529433025,11.8811881%200.811692571,12%201.10259271,12%20L9.89741264,12%20C10.191193,12%2010.470485,11.8811881%2010.6770739,11.6702146%20C10.8835755,11.4593302%2010.9999596,11.1710799%2010.9999596,10.8740056%20L10.9999596,2.57286104%20C11.0029728,2.36491796%2010.8370559,2.19859915%2010.6363147,2.19859915%20L10.6363147,2.19859915%20Z'%20id='Fill-1'%20fill='%232EB0DF'%20mask='url(%23mask-2)'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 介绍
介绍'%20fill-rule='nonzero'%3e%3cg%20id='wenjian-2'%20transform='translate(266.000000,%20248.000000)'%3e%3cpath%20d='M0,13%20L0,0%20L5.92307692,0%20L5.92307692,4.875%20L11,4.875%20L11,13%20L0,13%20Z%20M5.5,6.09375%20C5.5,5.86938432%205.31058201,5.6875%205.07692308,5.6875%20L1.26923077,5.6875%20C1.03557184,5.6875%200.846153846,5.86938432%200.846153846,6.09375%20L0.846153846,7.3125%20C0.846153846,7.53686568%201.03557184,7.71875%201.26923077,7.71875%20L5.07692308,7.71875%20C5.31058201,7.71875%205.5,7.53686568%205.5,7.3125%20L5.5,6.09375%20Z%20M10.1538462,8.9375%20C10.1538462,8.71313432%209.96442816,8.53125%209.73076923,8.53125%20L1.26923077,8.53125%20C1.03557184,8.53125%200.846153846,8.71313432%200.846153846,8.9375%20L0.846153846,10.15625%20C0.846153846,10.3806157%201.03557184,10.5625%201.26923077,10.5625%20L9.73076923,10.5625%20C9.96442816,10.5625%2010.1538462,10.3806157%2010.1538462,10.15625%20L10.1538462,8.9375%20Z'%20id='形状'%20fill='%233CC451'%3e%3c/path%3e%3cpolygon%20id='路径'%20fill='%23B0E7B8'%20points='7%200%2011%204%207%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 文件
文件基于动力性的智能电动汽车传动系统匹配仿真
简介
智能电动汽车传动系统主要包括驱动电机和变速装置,其动力性主要与驱动电机参数和变速装置传动比有关,因此,为了满足纯电动汽车的动力性,需要对驱动电机参数和变速装置传动比进行合理匹配。
使用说明
一、实验目的
- 建立驱动电机匹配数学模型
- 利用MWORKS匹配驱动电机参数
- 建立二挡变速器传动比匹配数学模型
- 利用MWORKS匹配二挡变速器传动比
- 建立纯电动汽车动力性数学模型
- 利用MWORKS仿真纯电动汽车动力性
二、仿真数据
基于动力性的纯电动汽车传动系统匹配仿真所需参数见表7-6-1。
| 整车质量/kg | 滚动阻力系数 | 空气阻力系数 | 迎风面积/m2 | 轮胎滚动半径/m |
|---|---|---|---|---|
| 1500 | 0.012 | 0.33 | 2.16 | 0.281 |
| 旋转质量换算系数 | 传动系统效率 | 主减速器传动比 | 汽车质心至后轴距离/m | 汽车轴距/m |
| 1.05(一挡),1.27(二挡〉 | 0.92 | 4.55 | 1.6 | 2.8 |
纯电动汽车设计目标:最高车速不低于110km/h;最大爬坡度不低于20°;百公里加速时间不超过15s。
三、实验步骤
1.建立驱动电机匹配数学模型
原理参见教材第7章实例6
2.利用MWORKS匹配驱动电机参数
利用驱动电机功率数学模型,编写驱动电机功率匹配的MWORKS程序如下。
m=1500;g=9.8;f=0.012;Cd=0.33;A=2.16;r=0.281;at=0.92#汽车参数赋值
figure(1)#设置图形窗口1
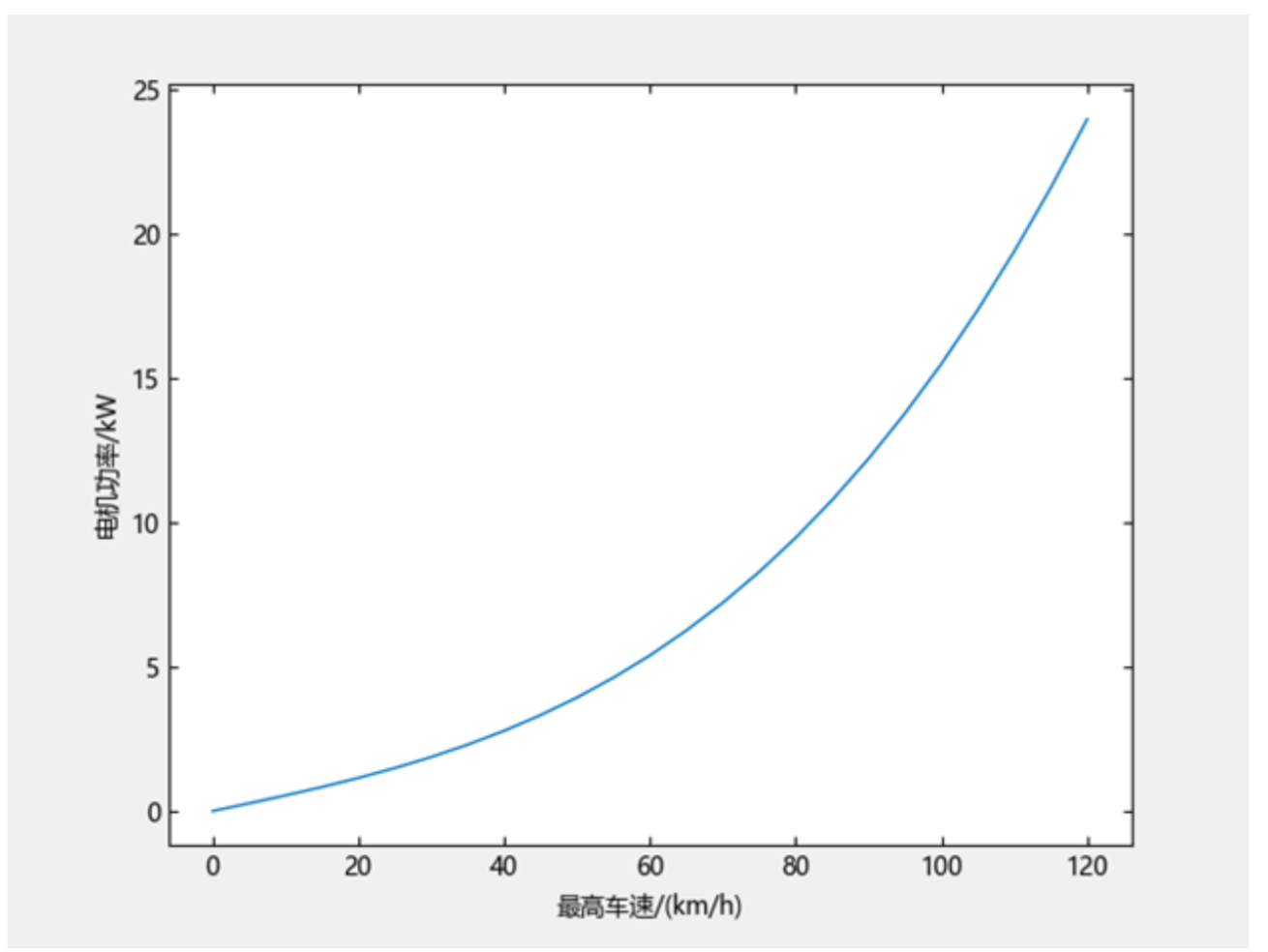
u=0:5:120#定义最高车速范围
Pm1=u.*(m*g*f.+Cd*A.*u.^2./21.15)./3600./at#根据最高车速计算电机功率
plot(u,Pm1)#绘制电机功率最高车速曲线
xlabel("最高车速/(km/h)")#x轴标注
ylabel("电机功率/kW")#y轴标注
figure(2)#设置图形窗口2
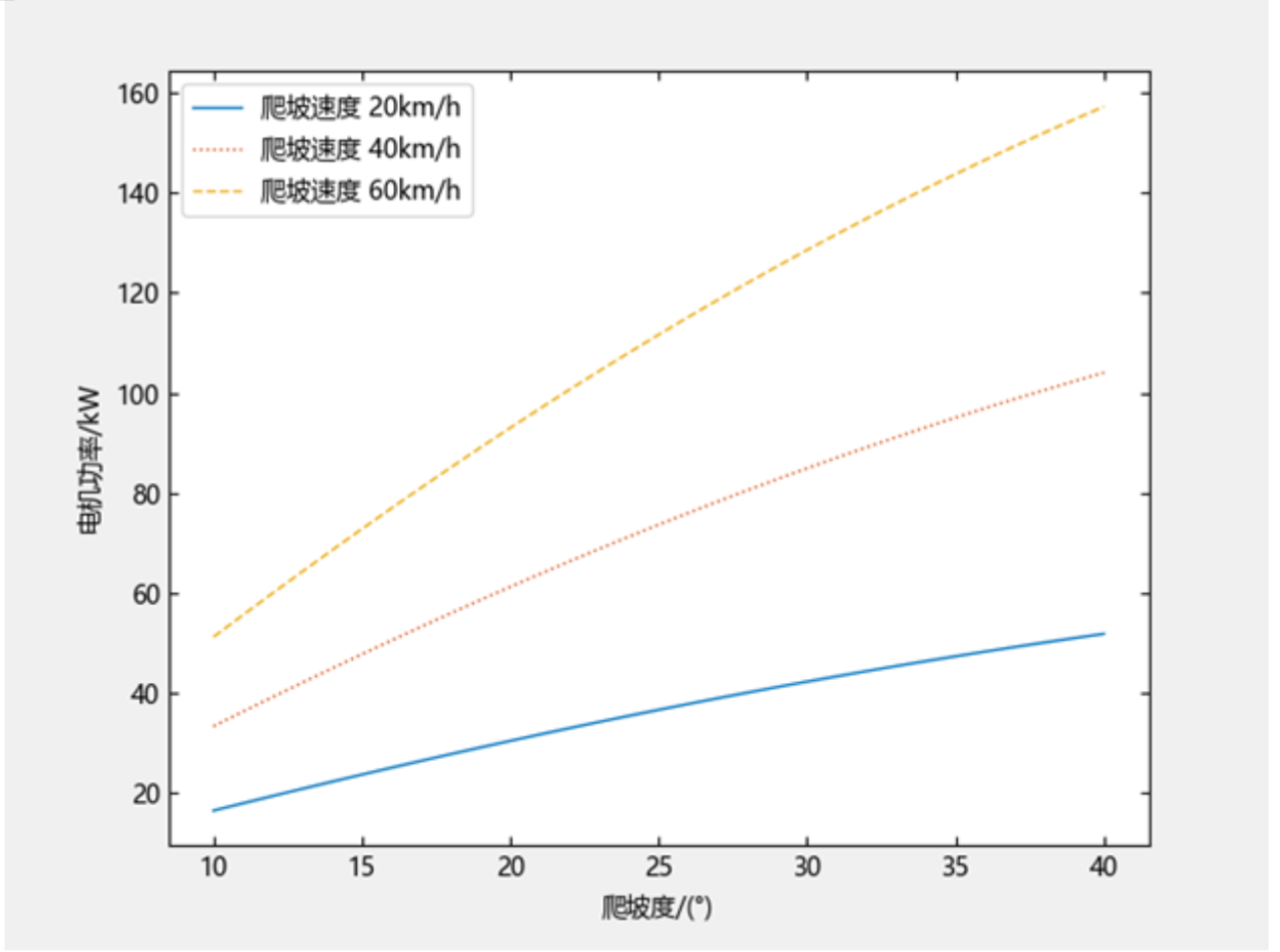
af1=10:1:40#定义最大爬坡度范围
af=atan.(af1.*pi/180)#转换最大爬坡度
up=[20,40,60]#设置爬坡速度
for i in 1:3#循环开始
Pm2=up[i].*(m*g*f.*cos.(af).+m*g*sin.(af).+Cd*A.*up[i].^2./21.15)./3600./at#根据最大爬坡度计算电机功率
m=1500;g=9.8;f=0.012;Cd=0.33;A=2.16;r=0.281;at=0.92#汽车参数赋值
figure(1)#设置图形窗口1
u=0:5:120#定义最高车速范围
Pm1=u.*(m*g*f.+Cd*A.*u.^2 ./ 21.15)./ 3600 ./ at#根据最高车速计算电机功率
plot(u,Pm1)#绘制电机功率最高车速曲线
xlabel("最高车速/(km/h)")#x轴标注
ylabel("电机功率/kW")#y轴标注
figure(2)#设置图形窗口2
af1=10:1:40#定义最大爬坡度范围
af=atan.(af1.*pi/180)#转换最大爬坡度
up=[20,40,60]#设置爬坡速度
for i in 1:3#循环开始
Pm2=up[i].*(m*g*f.*cos.(af).+m*g*sin.(af).+Cd*A.*up[i].^2 ./ 21.15) ./ 3600 ./ at#根据最大爬坡度计算电机功率
gss=["-", ":", "--"]#定义线型
plot(af1,Pm2,string(gss[i]))#绘制电机功率-爬坡度曲线
hold(true)#保存图形
end#循环结束
xlabel("爬坡度/(°)")#x轴标注
ylabel("电机功率/kW")#y轴标注
legend(["爬坡速度20km/h","爬坡速度40km/h","爬坡速度60km/h"])#曲线标注
figure(3)#设置图形窗口3
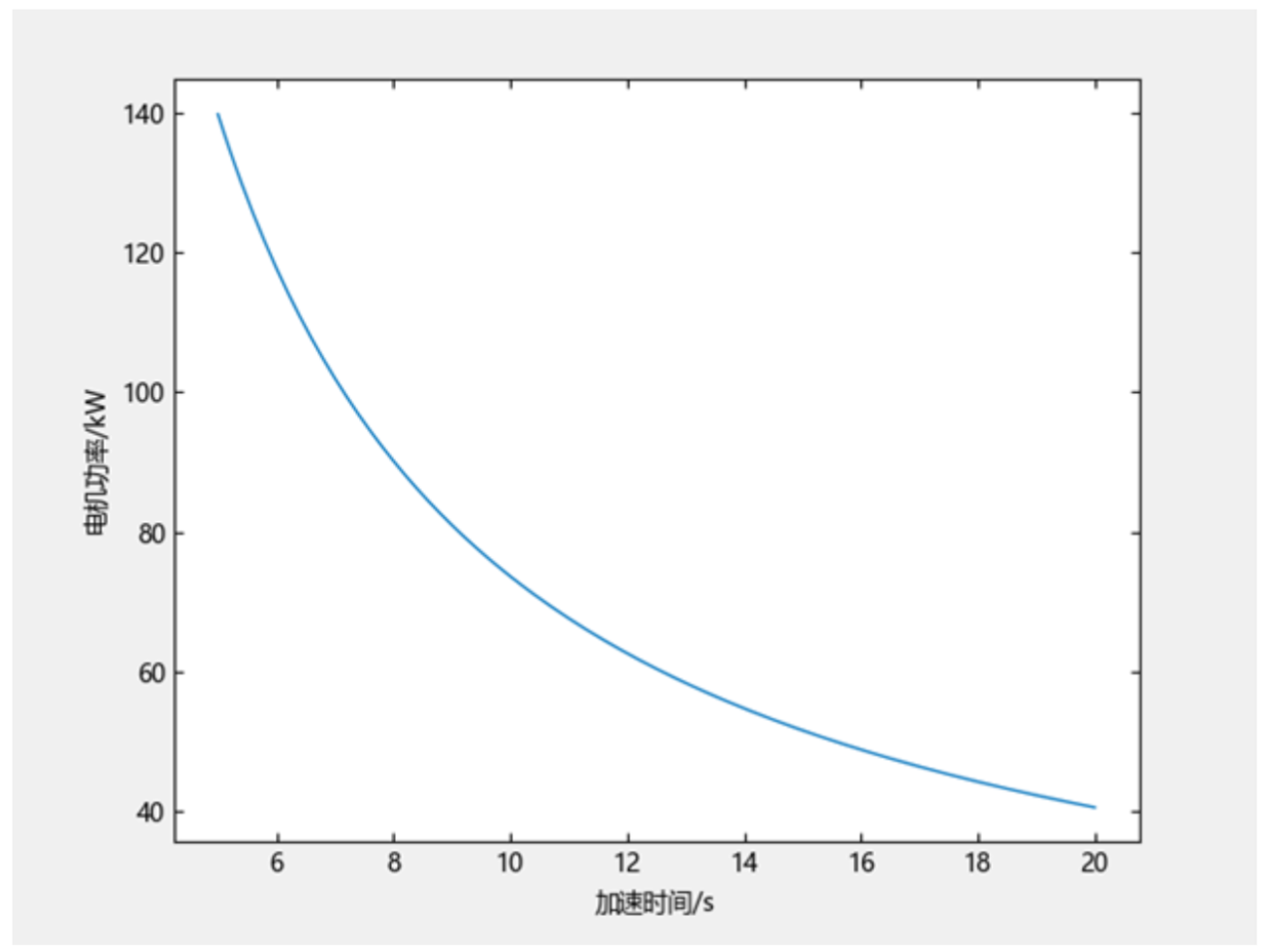
ue=100#加速终止速度赋值
dt=1.05#旋转质量换算系数赋值
te=5:0.1:20#定义加速时间范围
Pm3=(m*g*f*ue./1.5.+Cd*A*ue.^3. /52.875.+dt*m*ue.^2. /te./7.2)./3600. /at#根据加速时间计算电机功率
plot(te,Pm3)#绘制电机功率-加速时间曲线
xlabel("加速时间/s")#x轴标注
ylabel("电机功率/kW")#y轴标注
af=atan.(20. *pi/180)#最大爬坡度赋值
Pm11=110*(m*g*f.+Cd*A.*110 .^ 2 ./ 21.15) ./ 3600 ./ at#计算电机功率1
Pm22=20*(m*g*f.*cos.(af).+m*g*sin.(af).+Cd*A.*15. ^2. /21.15)./3600. /at#计算电机功率2
Pm33=(m*g*f*ue ./ 1.5.+Cd*A .* ue .^ 3 ./52.875.+dt*m*ue .^ 2 ./14 ./ 7.2) ./ 3600 ./at#计算电机功率3
@printf("电机需求功率Pm1=%.2fkW\n",Pm11)#输出电机功率1
@printf("电机需求功率Pm2=%.2fkW\n",Pm22)#输出电机功率2
@printf("电机需求功率Pm3=%.2fkW\n",Pm33)#输出电机功率3
在MWORKS编辑器中输入这些程序,点击运行按钮,就会得到根据电动汽车最高车速、最大爬坡度和加速时间所生成的电机功率曲线。



利用驱动电机转速数学模型,编写驱动电机转速匹配的MWORKS程序如下。
r=0.281#轮胎滚动半径赋值
figure(1)#设置图形窗口1
i=4.55#主减速器传动比赋值
u=0:5:120#定义最高车速范围
n=u*i/0.377/r#计算最高转速
plot(u,n)#绘制电机转速-最高车速曲线
xlabel("最高车速/(km/h)")#x轴标注
ylabel("电机最高转速/(r/min)")#y轴标注
figure(2)#设置图形窗口2
u=110#定义最高车速
i=4:1:12#定义传动系统传动比范围
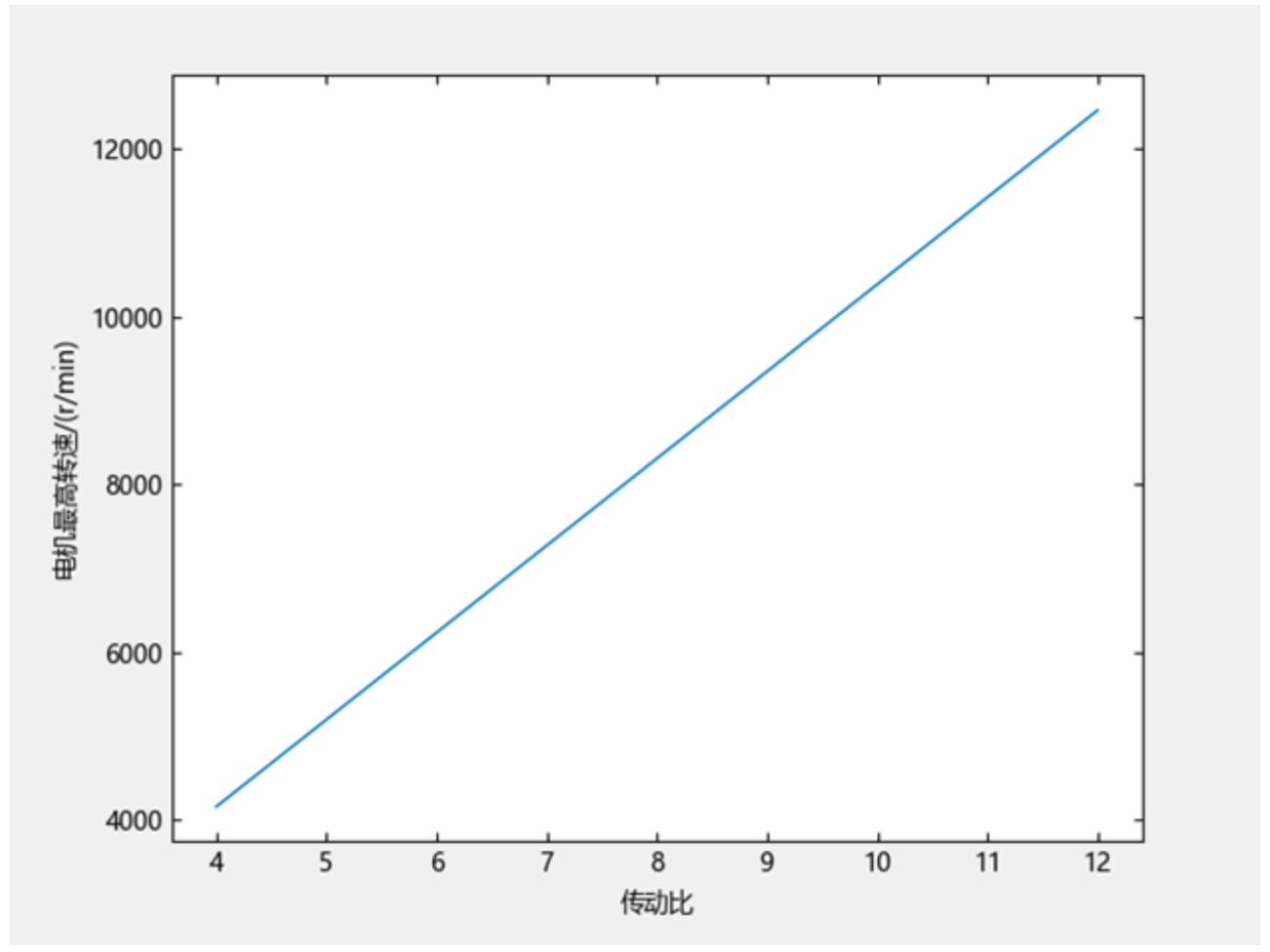
n=u*i/0.377/r#计算最高转速
plot(i,n)#绘制电机转速-传动比曲线
xlabel("传动比")#x轴标注
ylabel("电机最高转速/(r/min)")#y轴标注
在MWORKS编辑器中输入这些程序,点击运行按钮,就会得到电机最高转速与最高车速、传动比的关系曲线。
图7-6-4所示为电机最高转速-最高车速曲线。可以看出,最高车速越高,电机最高转速越高。
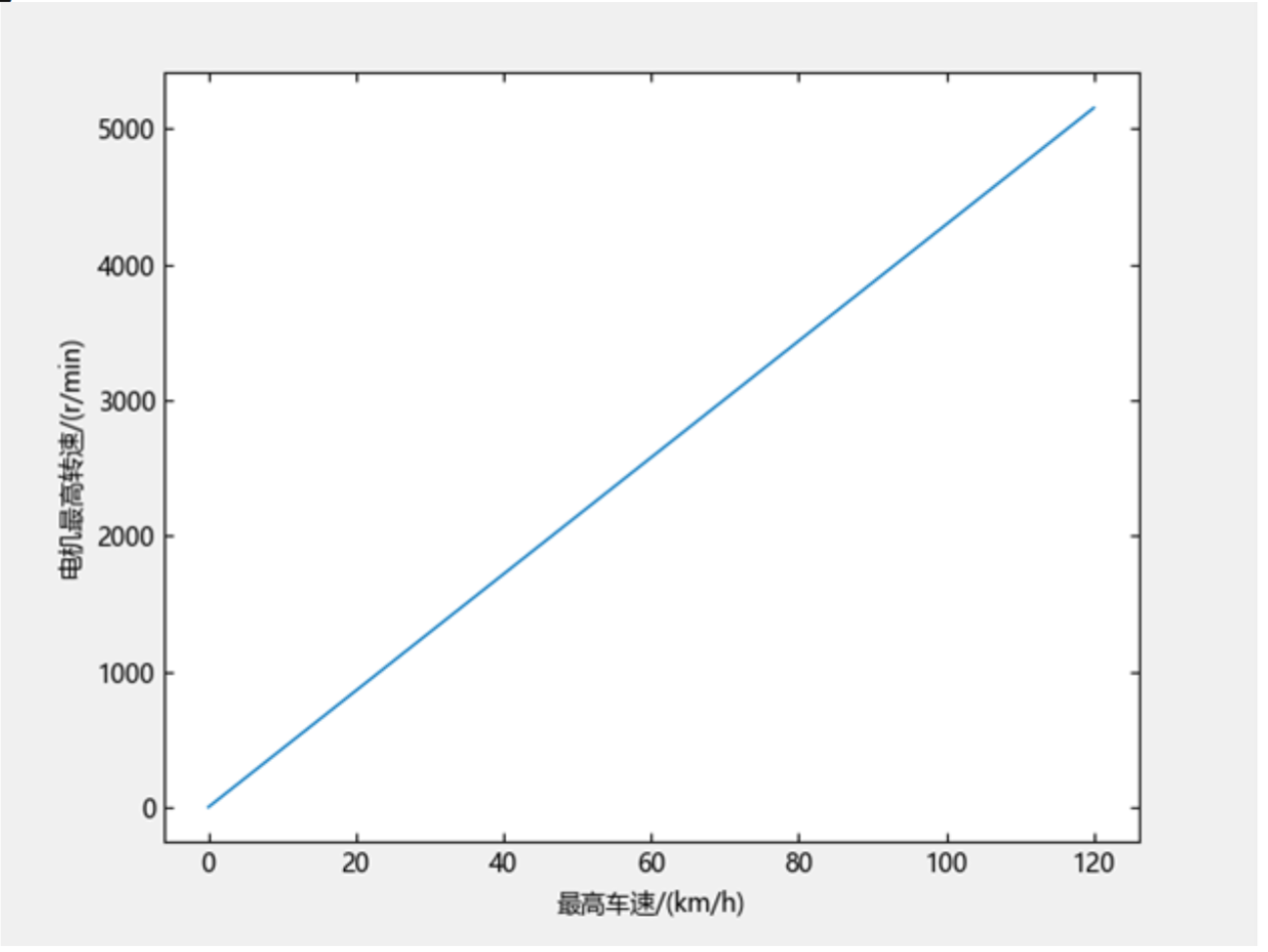
图7-6-5所示为电机最高转速-传动比曲线。可以看出,传动比越大,电机最高转速越高。
电机的最高转速取8000r/min;额定转速取3000r/min。
根据式(7-6-11)可以选取电机的额定转矩为70N•m;根据式(7-6-12)可以选取电机的峰值转矩为175N•m。
电机电压选择336V。
综上所述,驱动电机匹配参数见表7-6-2。
| 参数名称 | 参数值 |
|---|---|
| 额定功率/kW | 22 |
| 峰值功率/kW | 55 |
| 额定转矩/N • m | 70 |
| 峰值转矩/N • m | 175 |
| 额定转速/(r/min) | 3000 |
| 最高转速/(r/min) | 8000 |
| 额定电压/V | 336 |
3.建立二挡变速器传动比匹配数学模型
原理参见教材第7章实例6
4.利用MWORKS匹配二挡变速器传动比
利用变速装置传动比匹配数学模型,编写变速装置传动比匹配的MWORKS程序如下。
m=1500;g=9.8;f=0.012;Cd=0.33;A=2.16;r=0.281;at=0.92;#汽车参数赋值
af=atan(20*pi/180);#设置最大坡度角
Tmax=175;#设置峰值转矩
up=15;#设置爬坡车速
i0=4.55;#设置主减速器传动比
i11=r*(m*g*f*cos(af)+m*g*sin(af)+Cd*A*up^2/21.15)/Tmax/at/10;#计算一挡传动比下限
@printf("一挡传动比下限i11=%.2f\n",i11)#输出一挡传动比下限
nmax=8000;#设置电机最高转速
fa=0.70;#设置地面附着系数
i12=m*g*r*fa*1.6/Tmax/at/i0/2.8;#计算一挡传动比上限
@printf("一挡传动比上限i12=%.2f\n",i12)#输出一挡传动比上限
umax=110;#设置最高车速
i22=0.377*r*nmax/umax/i0;#计算二挡传动比上限
@printf("二挡传动比上限i22=%.2f\n",i22)#输出二挡传动比上限
i21=r*(m*g*f+Cd*A*umax^2/21.15)/Tmax/at/i0;#计算二挡传动比下限
@printf("二挡传动比下限i21=%.2f\n",i21)#输出二挡传动比下限

5.建立纯电动汽车动力性数学模型
原理参见教材第7章实例6
6.利用MWORKS仿真纯电动汽车动力性
根据纯电动汽车动力性数学模型,编写绘制纯电动汽车动力性仿真的MWORKS程序如下。
m=1500;g=9.8;f=0.012;Cd=0.33;A=2.16;r=0.281;at=0.92#汽车参数赋值
ig1=1.98;ig2=1;i0=4.55#传动比赋值
q1=1.05;q2=1.27#旋转质量换算系数赋值
u1=0:0.01:70#定义一挡速度范围
Ff1=Cd*A*(u1.^2)/21.15.+m*g*f#计算行驶阻力
Fw1=Cd*A*(u1.^2)/21.15#计算空气阻力
n1=ig1*i0*u1/r/0.377#计算电机转速
P=55#峰值功率赋值
T1=zeros(7001)
for i=1:1:7001#设置循环,求转矩
if n1[i]<3000#转速小于3000r/min时
T1[i]=175;#设置恒转矩
else#转速大于或等于3000r/min时
T1[i]=9550*P/n1[i];#计算转矩
end#结束
end#结束
Ft1=T1.*ig1*i0*at/r#计算驱动力
D1=(Ft1-Fw1)/m/g#计算动力因数
i1=tan.(asin.(D1.-f.*(1 .-D1.^2 .+f.^2).^(1/2))./(1 .+f.^2))*180/π#计算爬坡度
a1=(D1.-f)*g/q1#计算加速度
u2=0:0.01:180#定义速度范围
Ff2=Cd*A*(u2.^2)/21.15.+m*g*f#计算行驶阻力
Fw2=Cd*A*(u2.^2)/21.15#计算空气阻力
n2=ig2*i0*u2/r/0.377#计算电机转速
T2=zeros(18001)
for j=1:1:18001#设置循环,求转矩
if n2[j]<3000#转速小于3000x/min时
T2[j]=175;#设置恒转矩
else#转速大于或等于3000r/min时
T2[j]=9550*P/n2[j];#计算转矩
end#结束
end#结束
Ft2=T2.*ig2*i0*at/r#计算驱动力
D2=(Ft2-Fw2)/m/g#计算动力因数
i2=tan.(asin.(D2.-f.*(1 .-D2.^2 .+f.^2).^(1/2))./(1 .+f.^2))*180/π#计算爬坡度
a2=(D2.-f)*g/q2#计算加速度
figure(1)#设置图形窗☐1
plot(u1,Ft1,"r",linewidth=1.5);hold(true)#绘制一挡驱动力速度曲线
plot(u2,Ft2,"b",linewidth=1.5,linestyle="--");hold(true)#绘制二挡驱动力速度曲线
plot(u2,Ff2,"k",linewidth=1.5,linestyle="-.")#绘制行驶阻力速度曲线
xlabel("速度/(km/h)")#x轴标注
ylabel("驱动力-行驶阻力/N")#y轴标注
text(20,5500,"一挡驱动力")#驱动力曲线标注
text(20,3000,"二挡驱动力")#驱动力曲线标注
text(20,700,"行驶阻力")#行驶阻力曲线标注
legend(["一挡驱动力","二挡驱动力","行驶阻力"])#图例显示
figure(2)#设置图形窗口2
plot(u1,a1,"r",linewidth=1.5);hold(true)#绘制一挡加速度-速度曲线
plot(u2,a2,"b",linewidth=1.5,linestyle="--")#绘制二挡加速度-速度曲线
xlabel("速度/(km/h)")#x轴标注
ylabel("加速度/(m/s^2)")#y轴标注
text(50,2.5,"一挡加速度")#加速度曲线标注
text(100,1,"二挡加速度")#加速度曲线标注
legend(["一挡加速度","二挡加速度"])#图例显示
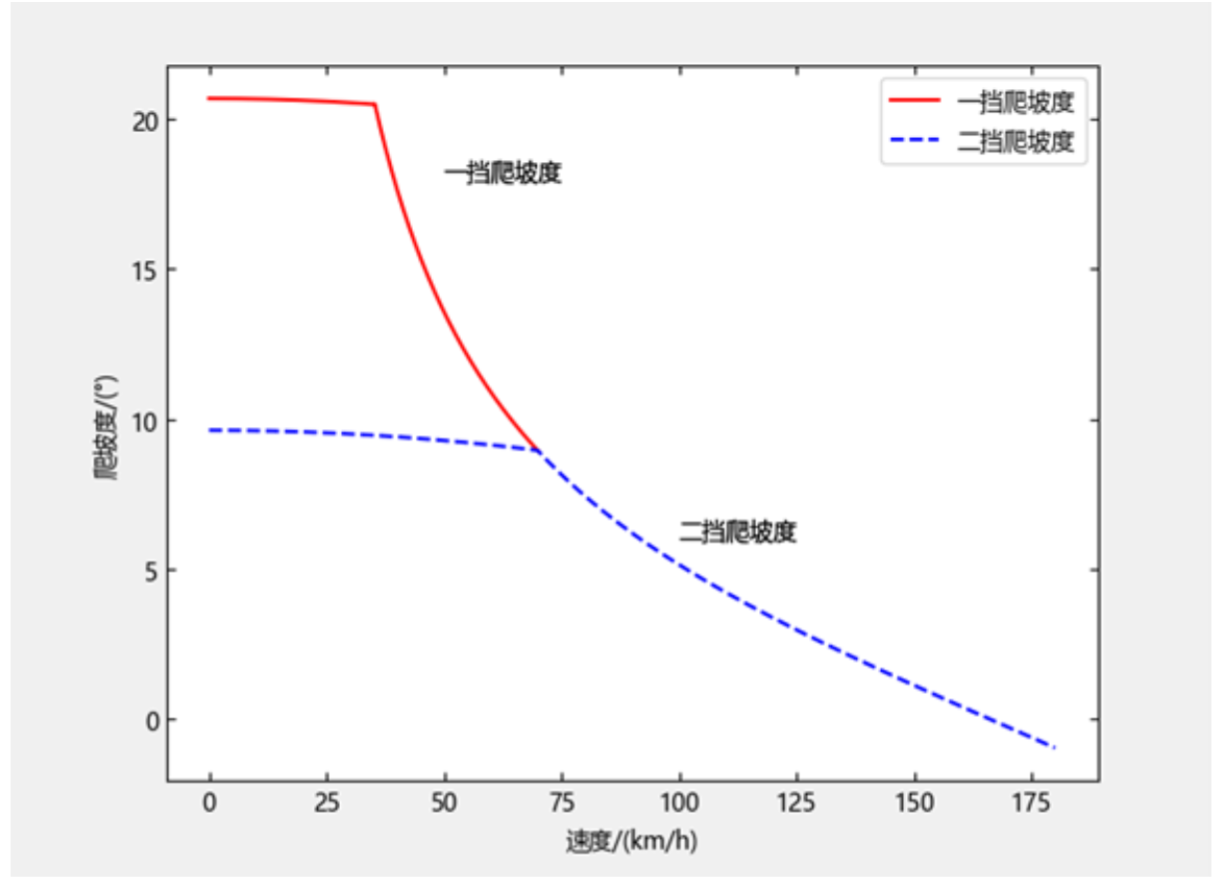
figure(3)#设置图形窗口3
plot(u1,i1,"r",linewidth=1.5);hold(true)#绘制一挡爬坡度速度曲线
plot(u2,i2,"b",linewidth=1.5,linestyle="-")#绘制二挡爬坡度速度曲线
xlabel("速度/(km/h)")#x轴标注
ylabel("爬坡度/(°)")#y轴标注
text(50,18,"一挡爬坡度")#爬坡度曲线标注
text(100,6,"二挡爬坡度")#爬坡度曲线标注
legend(["一挡爬坡度","二挡爬坡度"])#图例显示
在MWORKS编辑器中输入这些程序,点击运行按钮,就会得到电动汽车驱动力-行驶阻力平衡图,如图7-6-6所示。电动汽车最高车速约为167km/h,也就是一挡驱动力和行驶阻力相交点所对应的车速。
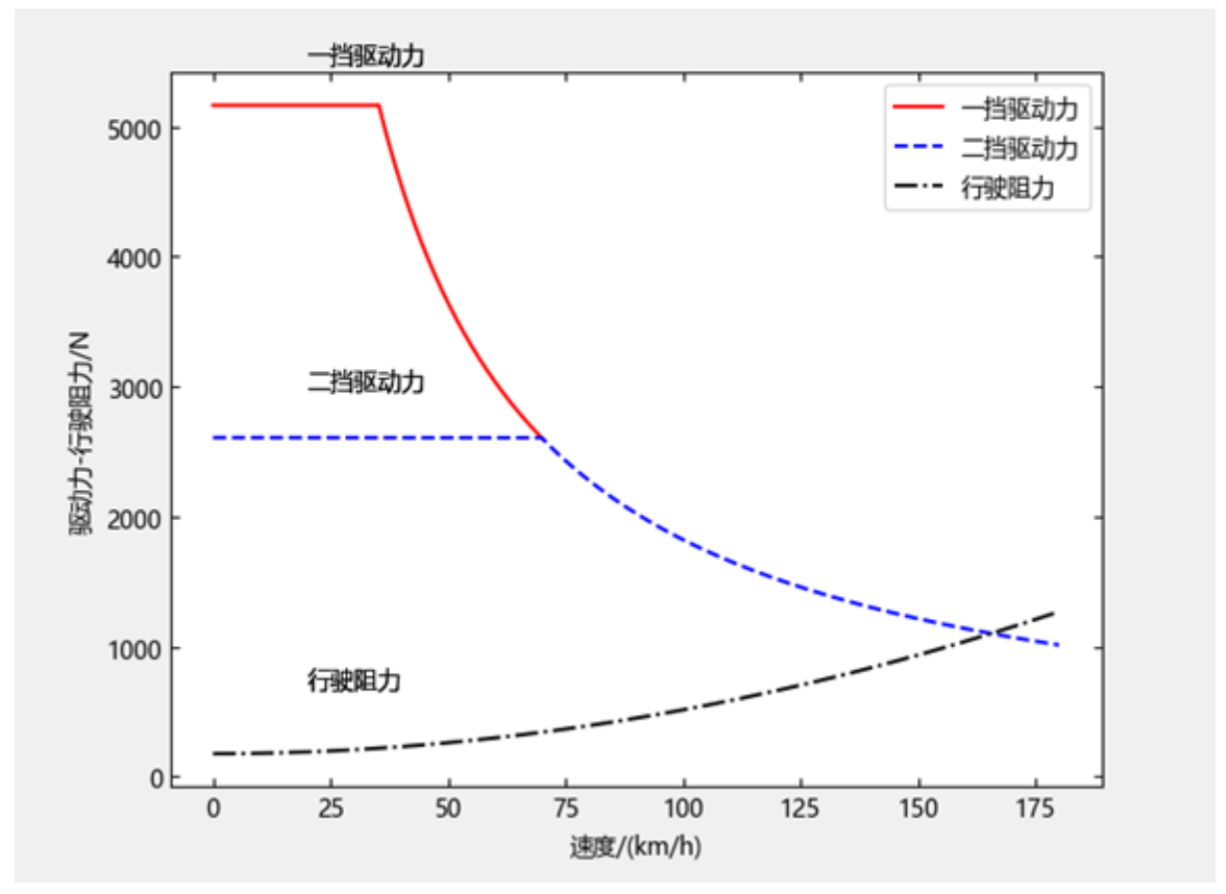
图7-6-7所示为电动汽车加速度-速度曲线。可以看出,一挡加速度大于二挡加速度,加速度出现负值是因为速度超过了最高车速,是无效的。
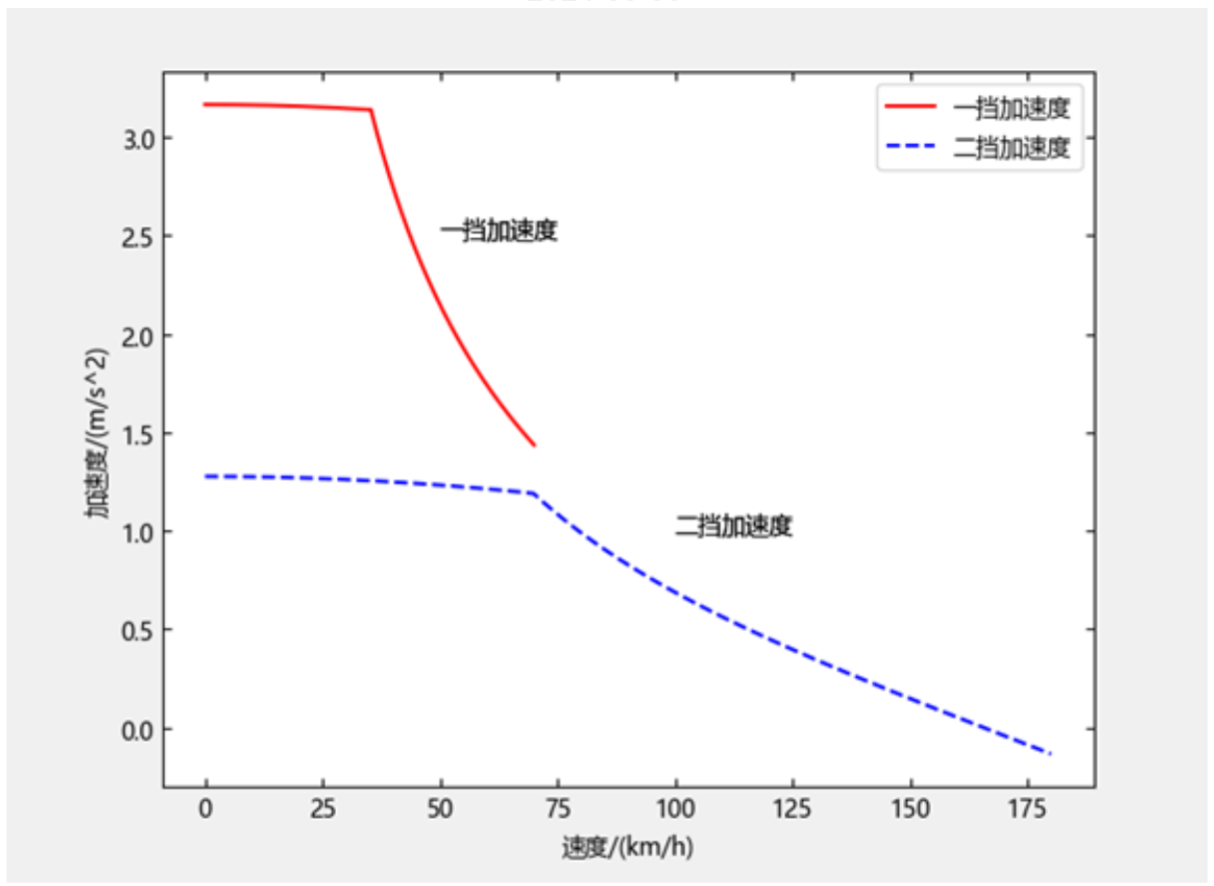
图7-6-8所示为电动汽车爬坡度-速度曲线。可以看出,一挡爬坡度大于二挡爬坡度,爬坡度出现负值是因为速度超过了最高车速,是无效的。