
'%3e%3cg%20id='编组'%20transform='translate(600.000000,%20248.000000)'%3e%3cmask%20id='mask-2'%20fill='white'%3e%3cuse%20xlink:href='%23path-1'%3e%3c/use%3e%3c/mask%3e%3cg%20id='Clip-2'%3e%3c/g%3e%3cpath%20d='M10.2668637,10.8710643%20C10.2668637,11.0790074%2010.1039142,11.2482675%209.89741264,11.2482675%20L9.64421692,11.2482675%20C9.44059555,11.2482675%209.27773336,11.0790074%209.27773336,10.8740056%20L9.27773336,3.32459352%20C9.27773336,3.11665045%209.44347575,2.95024251%209.64421692,2.95024251%20L9.89741264,2.95024251%20C10.101034,2.95024251%2010.2639835,3.11959178%2010.2639835,3.32459352%20L10.2668637,10.8710643%20Z%20M8.36706667,3.91580073%20L5.79234292,3.91580073%20C5.58872155,3.91580073%205.42577208,3.74645146%205.42577208,3.54144972%20C5.42577208,3.33350664%205.59160175,3.16709871%205.79234292,3.16709871%20L8.00049583,3.16709871%20C8.2041172,3.16709871%208.36706667,3.33644797%208.36706667,3.54144972%20L8.36706667,3.91580073%20Z%20M8.36706667,6.69375265%20L5.79234292,6.69375265%20C5.58872155,6.69375265%205.42577208,6.52431425%205.42577208,6.31940163%20C5.42577208,6.11145856%205.59160175,5.94505062%205.79234292,5.94505062%20L8.00049583,5.94505062%20C8.2041172,5.94505062%208.36706667,6.11439989%208.36706667,6.31940163%20L8.36706667,6.69375265%20Z%20M8.00049583,8.82995997%20L1.28003046,8.82995997%20C1.07640908,8.82995997%200.913459618,8.66052157%200.913459618,8.45551982%20C0.913459618,8.24757675%201.07928928,8.08116881%201.28003046,8.08116881%20L8.00049583,8.08116881%20C8.2041172,8.08116881%208.36706667,8.25060721%208.36706667,8.45551982%20C8.36706667,8.6634629%208.2041172,8.82995997%208.00049583,8.82995997%20L8.00049583,8.82995997%20Z%20M1.28003046,3.16709871%20L4.00024791,3.16709871%20C4.20386929,3.16709871%204.36681875,3.33644797%204.36681875,3.54144972%20L4.36681875,6.31940163%20C4.36681875,6.52743384%204.20098909,6.69375265%204.00024791,6.69375265%20L1.28003046,6.69375265%20C1.07640908,6.69375265%200.913459618,6.52431425%200.913459618,6.31940163%20L0.913459618,3.54144972%20C0.913459618,3.33350664%201.07928928,3.16709871%201.28003046,3.16709871%20L1.28003046,3.16709871%20Z%20M10.6363147,2.19859915%20L9.64709712,2.19859915%20C9.44347575,2.19859915%209.28061356,2.02916076%209.28061356,1.82424814%20L9.28061356,0.751643356%20C9.28061356,0.552613401%209.20206267,0.362496565%209.06529684,0.219886655%20C8.92861828,0.0802180743%208.73948518,0%208.54459169,0%20L0.736021876,0%20C0.541041102,0%200.354875483,0.0802180743%200.215229449,0.219886655%20C0.078550894,0.359466104%200,0.552613401%200,0.751643356%20L0,10.8740056%20C0,11.1740212%200.116342602,11.4593302%200.322844174,11.6702146%20C0.529433025,11.8811881%200.811692571,12%201.10259271,12%20L9.89741264,12%20C10.191193,12%2010.470485,11.8811881%2010.6770739,11.6702146%20C10.8835755,11.4593302%2010.9999596,11.1710799%2010.9999596,10.8740056%20L10.9999596,2.57286104%20C11.0029728,2.36491796%2010.8370559,2.19859915%2010.6363147,2.19859915%20L10.6363147,2.19859915%20Z'%20id='Fill-1'%20fill='%232EB0DF'%20mask='url(%23mask-2)'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 介绍
介绍'%20fill-rule='nonzero'%3e%3cg%20id='wenjian-2'%20transform='translate(266.000000,%20248.000000)'%3e%3cpath%20d='M0,13%20L0,0%20L5.92307692,0%20L5.92307692,4.875%20L11,4.875%20L11,13%20L0,13%20Z%20M5.5,6.09375%20C5.5,5.86938432%205.31058201,5.6875%205.07692308,5.6875%20L1.26923077,5.6875%20C1.03557184,5.6875%200.846153846,5.86938432%200.846153846,6.09375%20L0.846153846,7.3125%20C0.846153846,7.53686568%201.03557184,7.71875%201.26923077,7.71875%20L5.07692308,7.71875%20C5.31058201,7.71875%205.5,7.53686568%205.5,7.3125%20L5.5,6.09375%20Z%20M10.1538462,8.9375%20C10.1538462,8.71313432%209.96442816,8.53125%209.73076923,8.53125%20L1.26923077,8.53125%20C1.03557184,8.53125%200.846153846,8.71313432%200.846153846,8.9375%20L0.846153846,10.15625%20C0.846153846,10.3806157%201.03557184,10.5625%201.26923077,10.5625%20L9.73076923,10.5625%20C9.96442816,10.5625%2010.1538462,10.3806157%2010.1538462,10.15625%20L10.1538462,8.9375%20Z'%20id='形状'%20fill='%233CC451'%3e%3c/path%3e%3cpolygon%20id='路径'%20fill='%23B0E7B8'%20points='7%200%2011%204%207%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 文件
文件'%20fill='%23E98F36'%20fill-rule='nonzero'%3e%3cg%20id='banben'%20transform='translate(488.000000,%20248.000000)'%3e%3cpath%20d='M13.8411137,5.05355925%20C13.8392291,5.0572926%2013.8359311,5.06102595%2013.832633,5.0647593%20L7.61865006,12.6887317%20C7.47248575,12.8828147%207.24306591,12.9979879%206.99861809,13%20C6.75597641,13%206.53170953,12.8865994%206.38188417,12.6887317%20L0.165074312,5.0647593%20L0.153766746,5.05029256%20C-0.0413949538,4.77624559%20-0.051607722,4.41300147%200.12785355,4.12862116%20L2.52034771,0.362601848%20C2.65866033,0.137959039%202.90488705,0.00064089936%203.17053321,0%20L10.8262318,0%20C11.0877195,0%2011.3322458,0.134400684%2011.4783019,0.359801847%20L11.4811288,0.362601848%20L13.8684403,4.12768783%20C14.0531307,4.41002261%2014.0427654,4.78149119%2013.8411137,5.05355925%20Z%20M11.3751203,2.60074667%20L8.19298057,2.60074667%20L8.19298057,3.33015041%20L8.98827994,3.33015041%20L7.39673892,6.61316724%20L5.8061402,3.33015041%20L6.20426103,3.33015041%20L6.20426103,2.59981332%20L2.62494276,2.59981332%20L2.62494276,3.33015041%20L3.42118443,3.33015041%20L6.20426103,9.53311555%20L7.00003154,9.53311555%20L10.1821713,3.33015041%20L11.3751203,3.33015041%20L11.3751203,2.60074667%20Z'%20id='形状'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 版本
版本姿轨控系统作为卫星平台的“核心控制中枢”,其价值约占整星的 12%~20%,高价值源于精密传感器(如星敏感器)、执行机构(如飞轮、推进器)及复杂控制算法的集成,为了实现高精度的姿态控制,在卫星研制过程中必须对姿轨控系统的性能进行充分的测试与验证。从而确保系统能够稳定、可靠、精确地运行,发现并修正设计中的潜在问题,优化资源利用,并验证系统在复杂环境中的表现。
一、平台概况
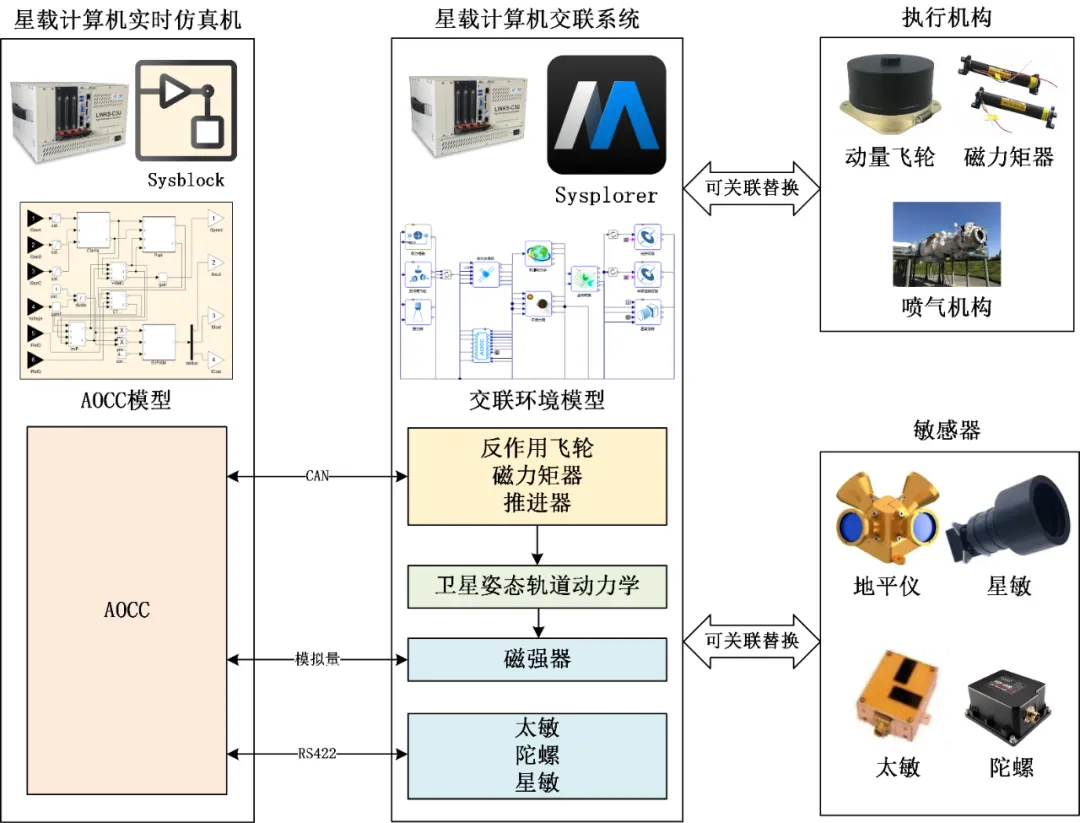
卫星姿轨控半实物仿真平台可在实验室中模拟卫星在轨道上运动特性,适用于验证卫星控制系统方案和性能指标。本平台包括两个实时仿真机:星载计算机实时仿真机、交联环境实时仿真机。星载计算机实时仿真机用来模拟卫星上的AOCC,实现卫星姿态控制和轨道控制,交联环境实时仿真机用来模拟卫星姿态控的制执行机构、卫星动力学及敏感器。
二、平台构成
系统主要部件和连接关系如下图所示,整体可以分为星载实时仿真机和星载交联仿真机两部分,两台仿真机参数仿真配置完全一致,可以完成分布式并行仿真试验。
三、平台特点
- 快速验证:卫星研制费用高且研制周期短,通过本平台的搭建,可以在方案设计早期就开始星载计算机的原型仿真验证。
- 模拟成本低:为测试星载计算机的软件和硬件接口的实时性能,采用一个星载计算机外部实时仿真环境与星载计算机形成回路。该外部仿真环境可以正确、灵活、实时地模拟卫星运动、姿态敏感器、执行机构、各种故障和边界条件等。相较于采用特制的模拟仿真器测试星载计算机软硬件,本平台可以快速低成本地模拟这种外部环境。
- 工况覆盖度高:除了检测正常状态下星载计算机的软硬件,该平台可以采用半实物仿真手段提供异常状态的模拟,在保证仿真结果可行度的情况下,检验卫星计算机对异常状态的处理是否有效且及时,测试流程可以对于异常工况有较高的覆盖度。
- 扩展性强,基于MWORKS开发环境可适应不同任务的测试需求,包括编队飞行、星间通信、任务规划等。
- 具备多个目标卫星的建模与分布式实时仿真功能,并具备模型状态的实时控制和图形化参数显示功能。
四、实验内容
三维姿态变换及其可视化实验
卫星质量特性与自由运动可视化实验
偏置动量卫星姿态动力学实验
零动量卫星姿态动力学实验
基于磁阻尼的消旋控制实验
基于矢量观测的卫星姿态确定实验
卫星三轴姿态控制原理可视化实验
五、示例模型
基于MWORKS设计的卫星姿态和轨道控制系统模型库,所有模型支持实时仿真运行,并提供模型说明文档,具体包括:
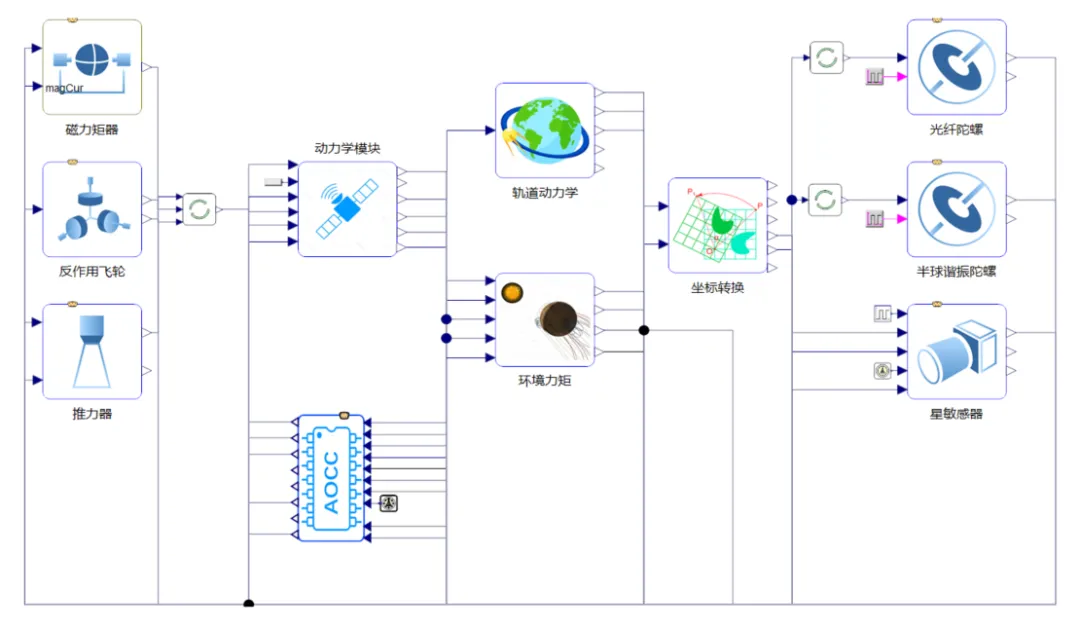
轨道动力学模型
环境数学模型(坐标变换、环境力矩)
敏感器模型(光纤陀螺、半球谐振陀螺、星敏感器)
执行器模型(磁力矩器、反作用轮、推力器)
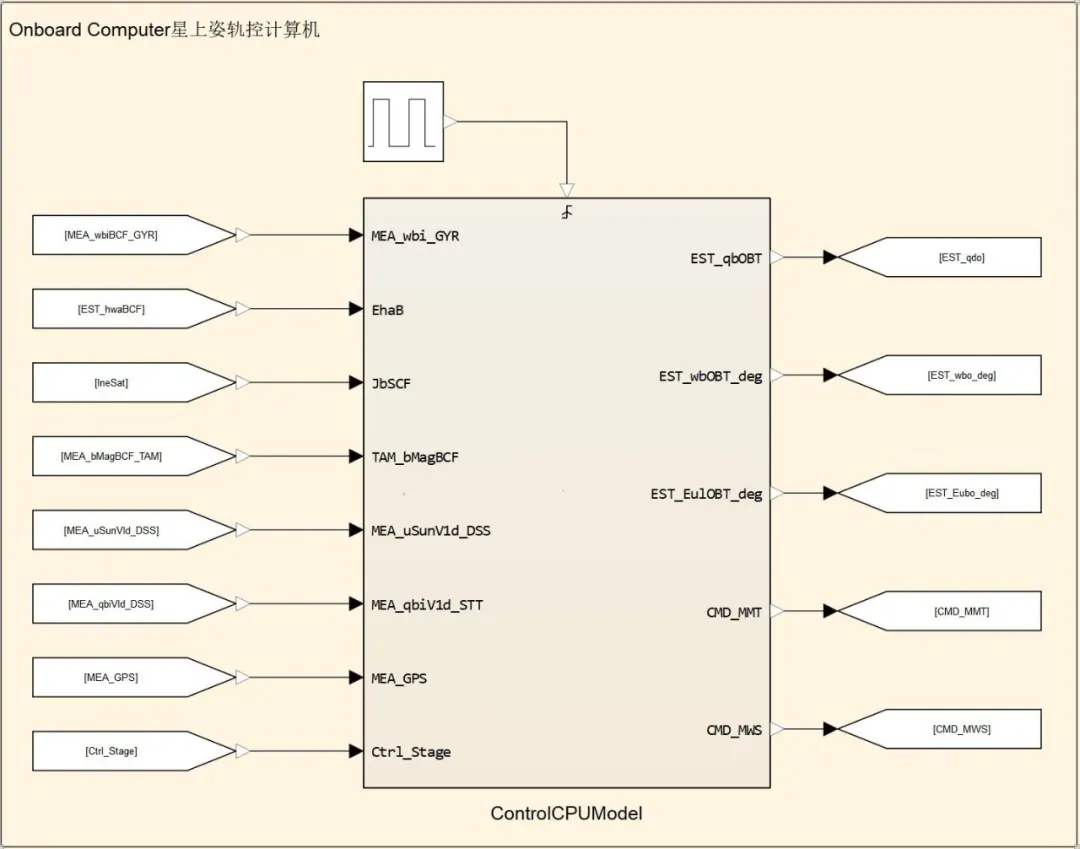
控制器模型(轨道估计器、姿态估计器、速率阻尼控制器、三轴稳定控制器)

六、适配课程及科研
1.适配教学课程
| - | - |
|---|---|
| 航天控制技术 | 线性系统理论 |
| 航天器设计 | 优化理论与最优控制 |
| 传感器技术应用 | 传感器融合 |
| 自动控制原理 | 自动控制原理 |
| 非线性控制系统理论 | 电工电子技术 |
| 现代控制理论 | 智能控制基础与实践 |
| 最优化理论与方法 | 电机及其应用 |
| 优化理论与最优控制 | 现代控制理论基础 |
2.支撑科研方向
(1)提供星载姿轨控计算机软件的动态测试平台,验证软件功能的正确性,以及时间性能。半实物的仿真环境可以进行边界值、异常值的充分测试,辅助包和测试和覆盖率测试,提高测试覆盖率。
(2)为卫星的研制和任务指定提供基本的仿真环境,包括卫星运行环境对于卫星轨道和姿态影响。基于模型驱动的卫星轨道、姿态控制状态仿真和评估可视化,实现了姿轨控一体的可视化仿真。
七、系统开发流程
使用MWORKS建模环境结合Links-RT仿真软件包,用户可按照6个步骤实现从卫星系统建模到硬件在环仿真的全过程。
- Sysplorer下的数学仿真:首先,在Sysplorer环境下建立卫星姿轨控系统数学模型,通过在Sysplorer下的数学仿真,初步验证卫星模型及算法;
- 添加IO模块:在算法模型中加入IO硬件模块,并完成硬件参数配置。
- 自动代码生成:用户完成HIL模型参数设置后,即可调用代码生成工具,将Sysplorer模型转换为C代码,并编译为可执行程序;
- 建立仿真工程:RT-Sim Plus管理环境中,根据软件向导,建立仿真工程,设置仿真目标机属性,配置监视及保存变量,准备仿真;
- 硬件在环实时仿真:在RT-Sim Plus环境下,点击【启动】,仿真开始,代码自动下载到实时仿真机,并启动实时运行,与真实设备通过IO硬件进行交互。上位机的RT-Sim Plus通过以太网监视目标机状态,并支持在线修改参数、启停控制、实时数据存储等功能;
- 数据后处理:仿真结束后,RT-Sim进行实时存储数据上传、格式转换(支持txt、xls、mat等格式)、数据回放等,能够与Sysplorer、Excel等工具无缝集成,并能够进行简单的数据处理。
八、相关阅读
教学&科研 | 基于MWORKS的四旋翼飞行控制实验平台
国产自主可控 | 基于MWORKS的无人机飞控半实物实验平台
高效测试,精准控制:多星并行半物理仿真系统在星载软件研制中的应用
中南大学论文丨基于噪声元学习的卫星遥测信号异常检测方法
关于我们
北京灵思创奇科技有限公司基于正向设计方法论MBSE,提供智能装备仿真测试一体化平台LINKS-XIL及轻量级数字孪生体解决方案,是国内第一家提出小型化、原型化、场景化、标准化工业数字孪生平台厂商。落地于无人系统,机器人,电机伺服控制等垂直产业场景,服务于国防军工,商业航天,汽车,能源电力及工厂自动化等行业,辅助装备的研发设计,虚拟测试及验证,缩短研发周期,降低研发成本,提升研发效率。除服务于工业场景,我司产品在高校工程教育及科研领域,如航空航天、机器人工程,自动化,电气工程,车辆工程,人工智能等专业广泛应用,可提升学生和老师的工程能力和创新能力。基于先进的科研产品,客户已先后发表70多篇高水平SCI/EI论文。灵思创奇是北京市2021年首批专精特新企业,产品软硬件均拥有自主知识产权,在多个工业领域实现进口产品替代。