
'%3e%3cg%20id='编组'%20transform='translate(600.000000,%20248.000000)'%3e%3cmask%20id='mask-2'%20fill='white'%3e%3cuse%20xlink:href='%23path-1'%3e%3c/use%3e%3c/mask%3e%3cg%20id='Clip-2'%3e%3c/g%3e%3cpath%20d='M10.2668637,10.8710643%20C10.2668637,11.0790074%2010.1039142,11.2482675%209.89741264,11.2482675%20L9.64421692,11.2482675%20C9.44059555,11.2482675%209.27773336,11.0790074%209.27773336,10.8740056%20L9.27773336,3.32459352%20C9.27773336,3.11665045%209.44347575,2.95024251%209.64421692,2.95024251%20L9.89741264,2.95024251%20C10.101034,2.95024251%2010.2639835,3.11959178%2010.2639835,3.32459352%20L10.2668637,10.8710643%20Z%20M8.36706667,3.91580073%20L5.79234292,3.91580073%20C5.58872155,3.91580073%205.42577208,3.74645146%205.42577208,3.54144972%20C5.42577208,3.33350664%205.59160175,3.16709871%205.79234292,3.16709871%20L8.00049583,3.16709871%20C8.2041172,3.16709871%208.36706667,3.33644797%208.36706667,3.54144972%20L8.36706667,3.91580073%20Z%20M8.36706667,6.69375265%20L5.79234292,6.69375265%20C5.58872155,6.69375265%205.42577208,6.52431425%205.42577208,6.31940163%20C5.42577208,6.11145856%205.59160175,5.94505062%205.79234292,5.94505062%20L8.00049583,5.94505062%20C8.2041172,5.94505062%208.36706667,6.11439989%208.36706667,6.31940163%20L8.36706667,6.69375265%20Z%20M8.00049583,8.82995997%20L1.28003046,8.82995997%20C1.07640908,8.82995997%200.913459618,8.66052157%200.913459618,8.45551982%20C0.913459618,8.24757675%201.07928928,8.08116881%201.28003046,8.08116881%20L8.00049583,8.08116881%20C8.2041172,8.08116881%208.36706667,8.25060721%208.36706667,8.45551982%20C8.36706667,8.6634629%208.2041172,8.82995997%208.00049583,8.82995997%20L8.00049583,8.82995997%20Z%20M1.28003046,3.16709871%20L4.00024791,3.16709871%20C4.20386929,3.16709871%204.36681875,3.33644797%204.36681875,3.54144972%20L4.36681875,6.31940163%20C4.36681875,6.52743384%204.20098909,6.69375265%204.00024791,6.69375265%20L1.28003046,6.69375265%20C1.07640908,6.69375265%200.913459618,6.52431425%200.913459618,6.31940163%20L0.913459618,3.54144972%20C0.913459618,3.33350664%201.07928928,3.16709871%201.28003046,3.16709871%20L1.28003046,3.16709871%20Z%20M10.6363147,2.19859915%20L9.64709712,2.19859915%20C9.44347575,2.19859915%209.28061356,2.02916076%209.28061356,1.82424814%20L9.28061356,0.751643356%20C9.28061356,0.552613401%209.20206267,0.362496565%209.06529684,0.219886655%20C8.92861828,0.0802180743%208.73948518,0%208.54459169,0%20L0.736021876,0%20C0.541041102,0%200.354875483,0.0802180743%200.215229449,0.219886655%20C0.078550894,0.359466104%200,0.552613401%200,0.751643356%20L0,10.8740056%20C0,11.1740212%200.116342602,11.4593302%200.322844174,11.6702146%20C0.529433025,11.8811881%200.811692571,12%201.10259271,12%20L9.89741264,12%20C10.191193,12%2010.470485,11.8811881%2010.6770739,11.6702146%20C10.8835755,11.4593302%2010.9999596,11.1710799%2010.9999596,10.8740056%20L10.9999596,2.57286104%20C11.0029728,2.36491796%2010.8370559,2.19859915%2010.6363147,2.19859915%20L10.6363147,2.19859915%20Z'%20id='Fill-1'%20fill='%232EB0DF'%20mask='url(%23mask-2)'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 介绍
介绍'%3e%3cg%20id='编组'%20transform='translate(152.000000,%20246.000000)'%3e%3cpolygon%20id='Fill-1'%20fill='%23FFDCA4'%20points='7%200%200%203.99965359%200%2011.9996536%207%2016%2014%2011.9996536%2014%203.99965359'%3e%3c/polygon%3e%3cpolygon%20id='Fill-2'%20fill='%23FB7B0C'%20points='7%208.47826338%207%2016%2014%2011.9997691%2014%204'%3e%3c/polygon%3e%3cpolygon%20id='Fill-3'%20fill='%23FFB53F'%20points='0%2011.9427252%207%2016%207%208.47852194%200%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 模型
模型'%20fill-rule='nonzero'%3e%3cg%20id='wenjian-2'%20transform='translate(266.000000,%20248.000000)'%3e%3cpath%20d='M0,13%20L0,0%20L5.92307692,0%20L5.92307692,4.875%20L11,4.875%20L11,13%20L0,13%20Z%20M5.5,6.09375%20C5.5,5.86938432%205.31058201,5.6875%205.07692308,5.6875%20L1.26923077,5.6875%20C1.03557184,5.6875%200.846153846,5.86938432%200.846153846,6.09375%20L0.846153846,7.3125%20C0.846153846,7.53686568%201.03557184,7.71875%201.26923077,7.71875%20L5.07692308,7.71875%20C5.31058201,7.71875%205.5,7.53686568%205.5,7.3125%20L5.5,6.09375%20Z%20M10.1538462,8.9375%20C10.1538462,8.71313432%209.96442816,8.53125%209.73076923,8.53125%20L1.26923077,8.53125%20C1.03557184,8.53125%200.846153846,8.71313432%200.846153846,8.9375%20L0.846153846,10.15625%20C0.846153846,10.3806157%201.03557184,10.5625%201.26923077,10.5625%20L9.73076923,10.5625%20C9.96442816,10.5625%2010.1538462,10.3806157%2010.1538462,10.15625%20L10.1538462,8.9375%20Z'%20id='形状'%20fill='%233CC451'%3e%3c/path%3e%3cpolygon%20id='路径'%20fill='%23B0E7B8'%20points='7%200%2011%204%207%204'%3e%3c/polygon%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 文件
文件'%20fill='%23754DB9'%20fill-rule='nonzero'%3e%3cg%20id='zhongjianyilai'%20transform='translate(375.000000,%20248.000000)'%3e%3cpath%20d='M12.0782814,0.180190258%20L12.1345248,0.237604237%20L17.7588701,5.97900216%20C18.0400873,6.26607205%2018.0963308,6.78279787%2017.8151135,7.06986776%20L17.7588701,7.12728174%20L12.1907683,12.7538517%20C11.909551,13.0409216%2011.4033599,13.0983356%2011.1221427,12.8112657%20L11.0658992,12.7538517%20L9.71605638,11.3759162%20L10.2222474,10.8591904%20L11.5720903,12.2371259%20C11.6283338,12.2945399%2011.6845772,12.2945399%2011.6845772,12.2371259%20L17.252679,6.61055593%20C17.3089224,6.55314195%2017.3089224,6.49572797%2017.252679,6.49572797%20L11.6283338,0.75433005%20C11.5720903,0.696916071%2011.5158469,0.696916071%2011.5158469,0.75433005%20L9.65981293,2.53416341%20L13.0344201,5.97900216%20C13.2593939,6.20865808%2013.2593939,6.55314195%2013.0344201,6.78279787%20L11.2346296,8.50521724%20L7.07261412,12.7538517%20C6.79139686,13.0409216%206.28520579,13.0983356%206.00398853,12.8112657%20L5.94774508,12.7538517%20L0.210912946,6.89762583%20C-0.0703043153,6.61055593%20-0.0703043153,6.09383012%200.210912946,5.80676022%20L0.267156398,5.74934624%20L5.94774508,0.237604237%20C6.22896234,-0.0494656589%206.73515341,-0.0494656589%207.01637067,0.180190258%20L7.07261412,0.237604237%20L8.42245698,1.61553974%20L7.86002245,2.13226555%20L6.5101796,0.75433005%20C6.45393615,0.696916071%206.3976927,0.696916071%206.3976927,0.75433005%20L0.717104016,6.26607205%20C0.660860564,6.32348603%200.660860564,6.38090001%200.717104016,6.38090001%20L6.3976927,12.2371259%20C6.45393615,12.2945399%206.5101796,12.2945399%206.5101796,12.2371259%20L8.19748317,10.5147065%20L4.82287603,6.95503981%20C4.59790222,6.72538389%204.59790222,6.38090001%204.82287603,6.1512441%20L5.2165802,5.74934624%20L5.27282365,5.69193226%20L5.3290671,5.63451828%20L11.0096558,0.122776279%20C11.290873,-0.0494656589%2011.7970641,-0.0494656589%2012.0782814,0.180190258%20Z'%20id='路径'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 依赖
依赖'%20fill='%23E98F36'%20fill-rule='nonzero'%3e%3cg%20id='banben'%20transform='translate(488.000000,%20248.000000)'%3e%3cpath%20d='M13.8411137,5.05355925%20C13.8392291,5.0572926%2013.8359311,5.06102595%2013.832633,5.0647593%20L7.61865006,12.6887317%20C7.47248575,12.8828147%207.24306591,12.9979879%206.99861809,13%20C6.75597641,13%206.53170953,12.8865994%206.38188417,12.6887317%20L0.165074312,5.0647593%20L0.153766746,5.05029256%20C-0.0413949538,4.77624559%20-0.051607722,4.41300147%200.12785355,4.12862116%20L2.52034771,0.362601848%20C2.65866033,0.137959039%202.90488705,0.00064089936%203.17053321,0%20L10.8262318,0%20C11.0877195,0%2011.3322458,0.134400684%2011.4783019,0.359801847%20L11.4811288,0.362601848%20L13.8684403,4.12768783%20C14.0531307,4.41002261%2014.0427654,4.78149119%2013.8411137,5.05355925%20Z%20M11.3751203,2.60074667%20L8.19298057,2.60074667%20L8.19298057,3.33015041%20L8.98827994,3.33015041%20L7.39673892,6.61316724%20L5.8061402,3.33015041%20L6.20426103,3.33015041%20L6.20426103,2.59981332%20L2.62494276,2.59981332%20L2.62494276,3.33015041%20L3.42118443,3.33015041%20L6.20426103,9.53311555%20L7.00003154,9.53311555%20L10.1821713,3.33015041%20L11.3751203,3.33015041%20L11.3751203,2.60074667%20Z'%20id='形状'%3e%3c/path%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e) 版本
版本汽车全主动悬架最优控制仿真
简介
汽车全主动悬架是一种具有做功能力的悬架,在悬架系统中附加一个可控制作用力的力发生器,因此需要一套提供能量的设备。全主动悬架可根据汽车载荷、路面状况、行驶速度、驱动、制动、转向等行驶条件的变化,自动调节悬架的刚度、阻尼和车身高度等控制参数,同时满足汽车行驶平顺性和操纵稳定性的要求。
使用说明
一、实验目的
1.建立汽车全主动悬架数学模型
2.建立汽车全主动悬架最优控制数学模型
3.建立汽车全主动悬架评价指标传递函数
4.求汽车全主动悬架最优控制参数
5.绘制汽车全主动悬架输出变量的时域特性曲线
6.绘制汽车全主动悬架输出变量的频域特性曲线
二、仿真数据
汽车全主动悬架最优控制仿真所需参数见表6-12-1。
| 悬挂质量/kg | 非悬挂质量/kg | 轮胎刚度/(N/m) | 下截止频率/Hz |
|---|---|---|---|
| 280 | 50 | 180000 | 0.07 |
| 路面不平度系数 | 车速/(km/h) | 仿真时间/s | |
| 5×10⁻⁶ | 60 | 10 |
三、实验步骤
1.建立汽车全主动悬架数学模型
原理参考教材第六章实例12
2.建立汽车全主动悬架最优控制数学模型
原理参考教材第六章实例12
3.建立汽车全主动悬架评价指标传递函数
原理参考教材第六章实例12
4.求汽车全主动悬架最优控制参数
根据汽车全主动悬架最优控制数学模型,编写求汽车全主动悬架最优控制参数的MWORKS程序如下。
# 系统参数
ms = 280
mw = 50
kw = 180000
q1 = 300000000
q2 = 4000000
q3 = 200
q4 = 1
# 系统状态空间矩阵
A = [0 1 0 -1
0 0 0 0
0 0 0 -1
0 0 kw/mw 0]
# 输入矩阵
B = [0 1.0 / ms 0 -1 / mw]'
# 输出矩阵
E = [0 0 1 0]'
# 权重矩阵
Qd = [q2 0 0 0
0 0 0 0
0 0 q3*kw^2 0
0 0 0 0]
# 控制权重
Rd = q4 + q1 / ms^2
# 平衡状态权重
Nd = [0 0 0 0]'
# 计算最优增益矩阵
K, S, E = lqr(A, B, Qd, Rd, Nd)
println("K = ", K)
在MWORKS编辑器中输入这些程序,点击运行按钮,就会得到汽车全主动悬架最优控制参数为
k1 = 33.59,k2 = 146.74,k3 = 5637.28,k4 = - 888.41
5.绘制汽车全主动悬架输出变量的时域特性曲线
根据汽车全主动悬架特性数学模型,编写绘制车身垂直加速度、悬架动挠度和轮胎动载荷时域特性曲线的MWORKS程序如下。
ms = 280
mw = 50
Kw = 180000
k1 = 32.33
k2 = 136.38
k3 = 4933.68
k4 = -680.75
u = 16.67
f0 = 0.07
Sq = 0.000005
# 定义状态空间矩阵 A
A = [0 1 0 -1
-k1/ms -k2/ms -k3/ms -k4/ms
0 0 0 -1
k1/mw k2/mw Kw/mw+k3/mw k4/mw]
# 定义输入矩阵 B
B = [0 0 1 0]'
# 定义输出矩阵 C
C = [-k1/ms -k2/ms -k3/ms -k4/ms
1 0 0 0
0 0 Kw 0]
# 生成随机白噪声
white_noise = 1 .- 2 * 1 * rand(1, 1000)
# 初始化位移和速度数组
q = Array{Float64}(undef, 1001)
dq = Array{Float64}(undef, 1000)
# 模拟系统响应
for i = 1:1000
q[1] = 0
q[i+1] = 0.01 * (-2 * pi * f0 * q[i] + 2 * pi * (sqrt(Sq * u)) * white_noise[i]) + q[i]
global dq = 100 .* diff(q)
end
x = Array{Float64}(undef, 4, 1001)
y = Array{Float64}(undef, 3, 1000)
# 模拟系统响应
for i = 1:1000
x[:, 1] = [0; 0; 0; 0]
# 创建连续时间状态空间模型
sysc = ss(A, B, zeros(size(A)), zeros(size(B)))
# 将连续时间状态空间模型转换为离散时间状态空间模型
sysd = c2d(sysc, 0.01)
# 获取离散时间状态空间模型的矩阵
G = sysd.A
H = sysd.B
# 计算下一个时间步的状态
x[:, i+1] = G * x[:, i] + H * dq[i]
# 计算输出
y[:, i] = C * x[:, i]
end
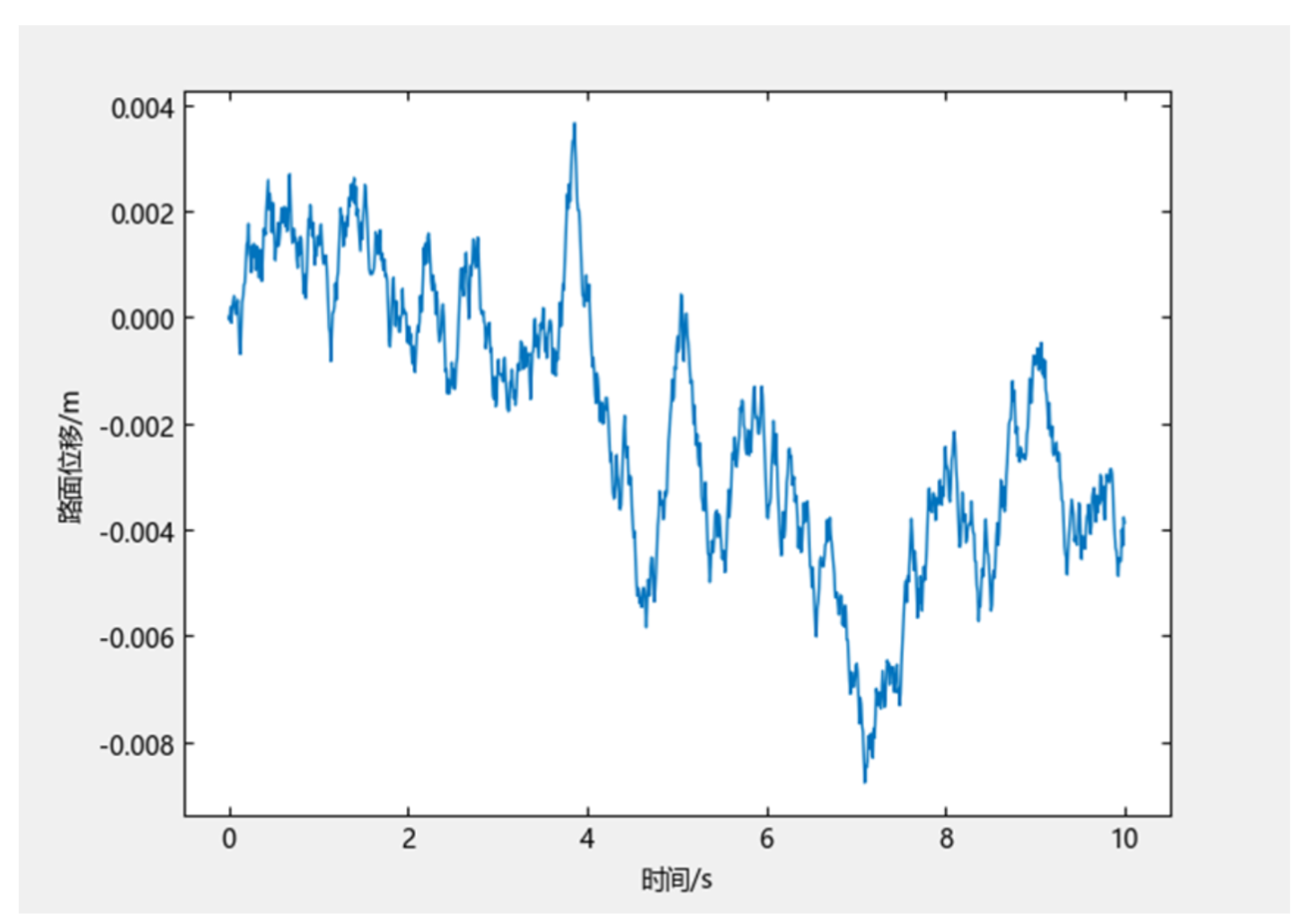
# 绘制位移随时间的变化曲线
figure(1)
t = 0:0.01:10
plot(t, q)
xlabel("时间/s")
ylabel("路面位移/m")
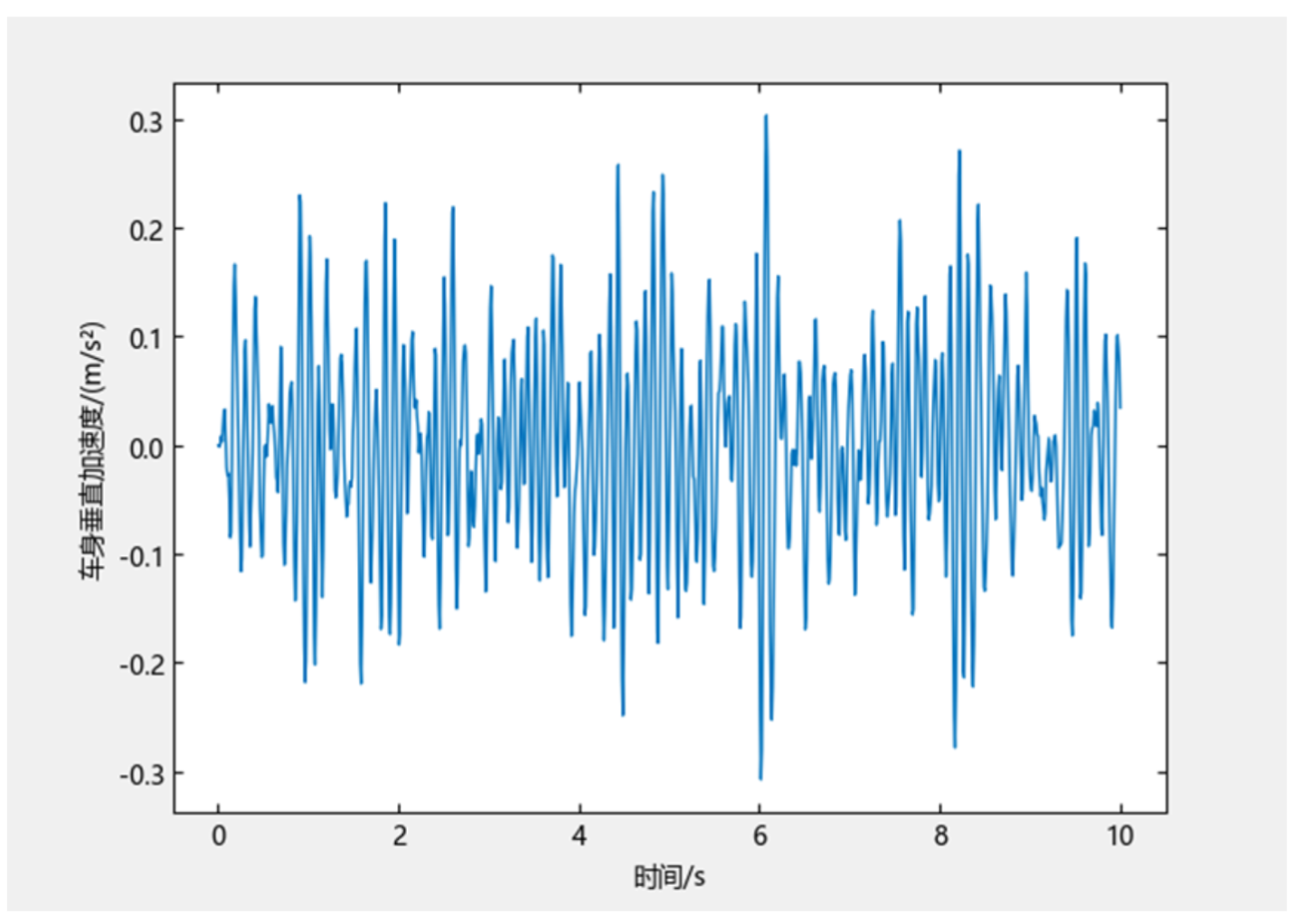
# 绘制输出y[1,:]随时间的变化曲线
figure(2)
t1 = 0.01:0.01:10
plot(t1, y[1, :])
xlabel("时间/s")
ylabel("车身垂直加速度/(m/s²)")
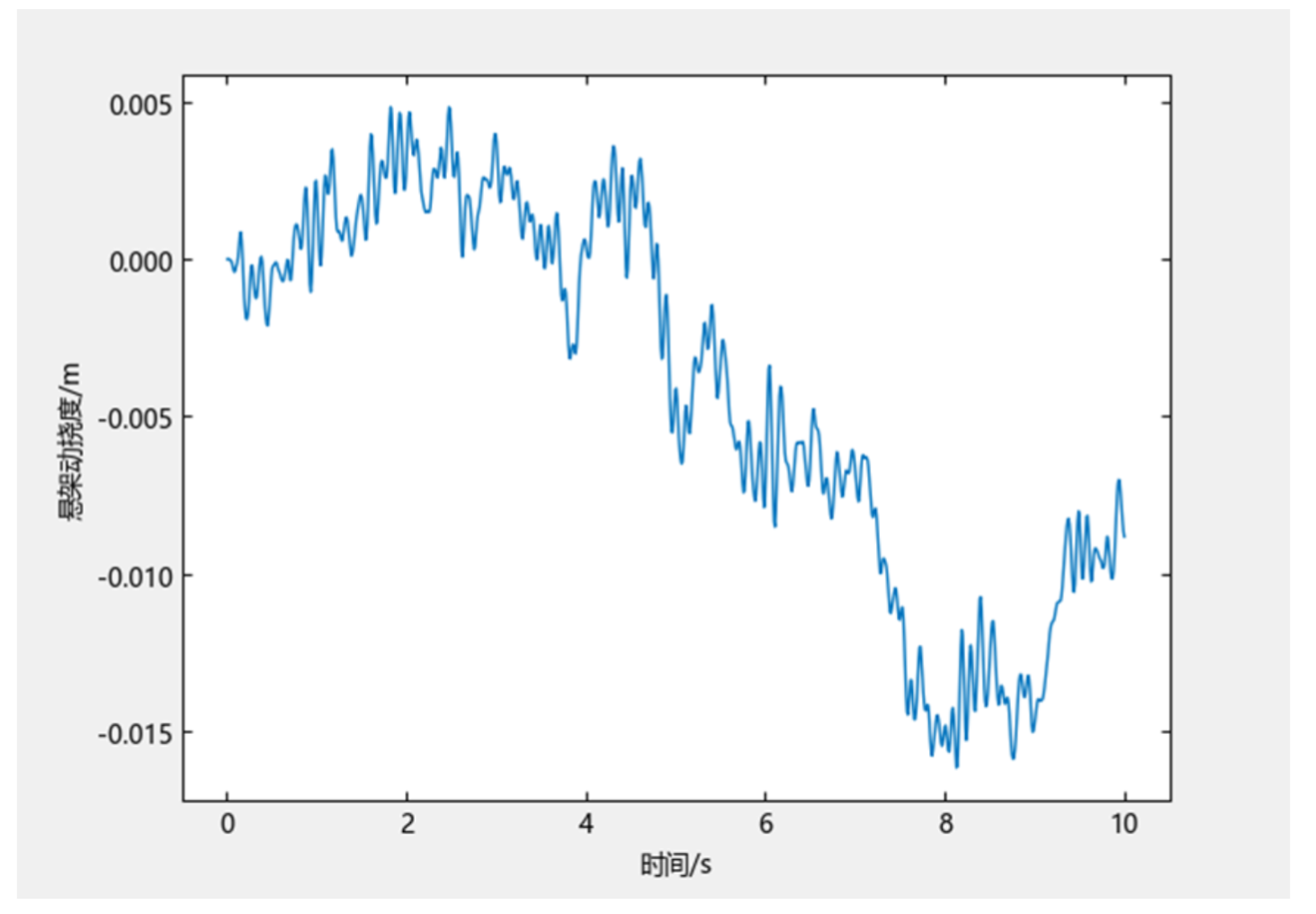
# 绘制输出y[2,:]随时间的变化曲线
figure(3)
t1 = 0.01:0.01:10
plot(t1, y[2, :])
xlabel("时间/s")
ylabel("悬架动挠度/m")
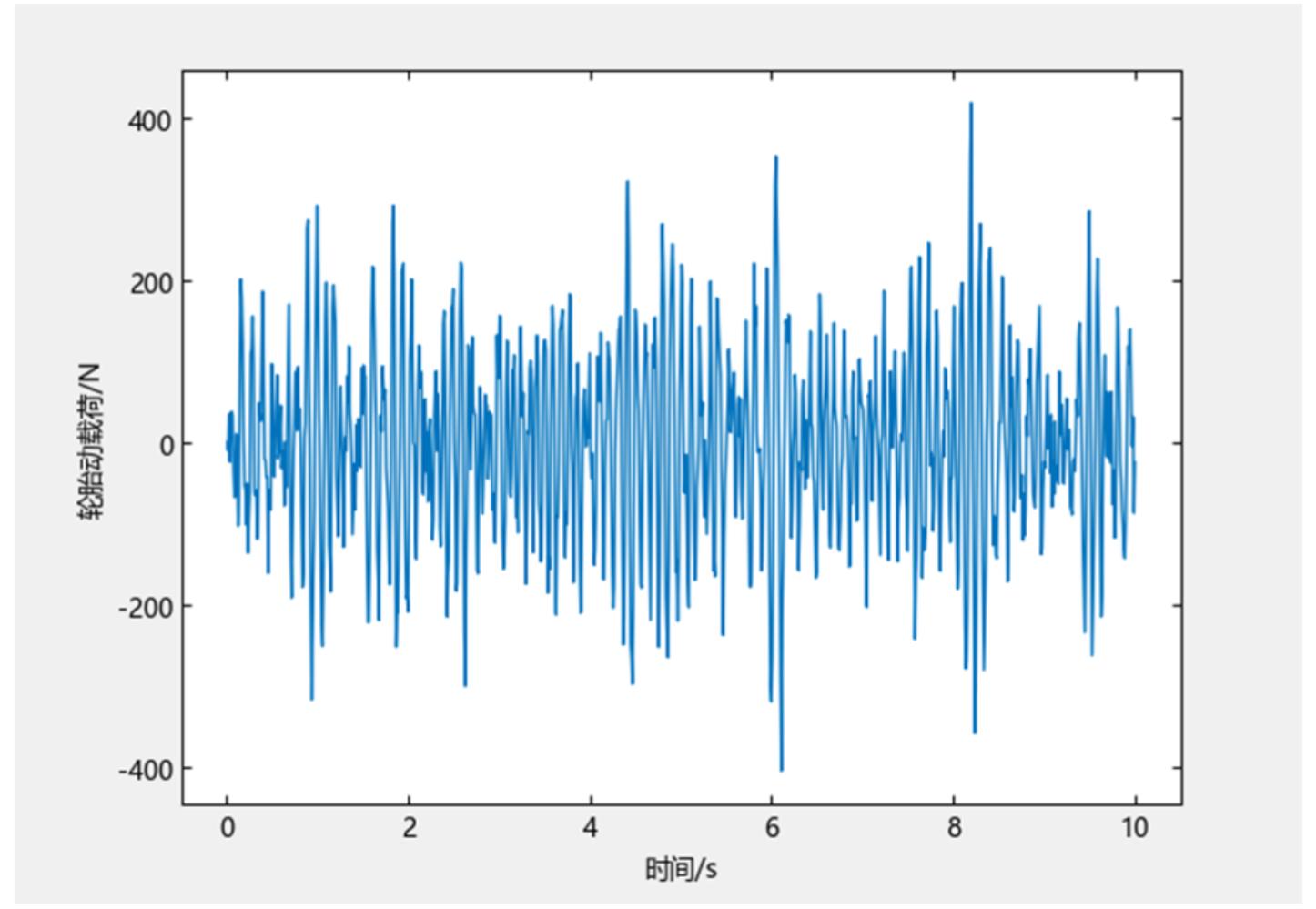
# 绘制输出y[3,:]随时间的变化曲线
figure(4)
t1 = 0.01:0.01:10
plot(t1, y[3, :])
xlabel("时间/s")
ylabel("轮胎动载荷/N")
在MWORKS编辑器中输入这些程序,点击运行按钮,就会得到路面位移时域特性曲线(图6-12-2)、车身垂直加速度时域特性曲线(图6-12-3)、悬架动挠度时域特性曲线(图6-12-4)、轮胎动载荷时域特性曲线(图6-12-5)。由于路面位移是随机产生的,所以每次运行得到的图形都会不同。
登录账号即可下载资源、参与讨论。