
# FourLink(四连杆机构)
本案例使用拖拽式建模在MWORKS.MoHub平台搭建机械曲柄四连杆机构模型。
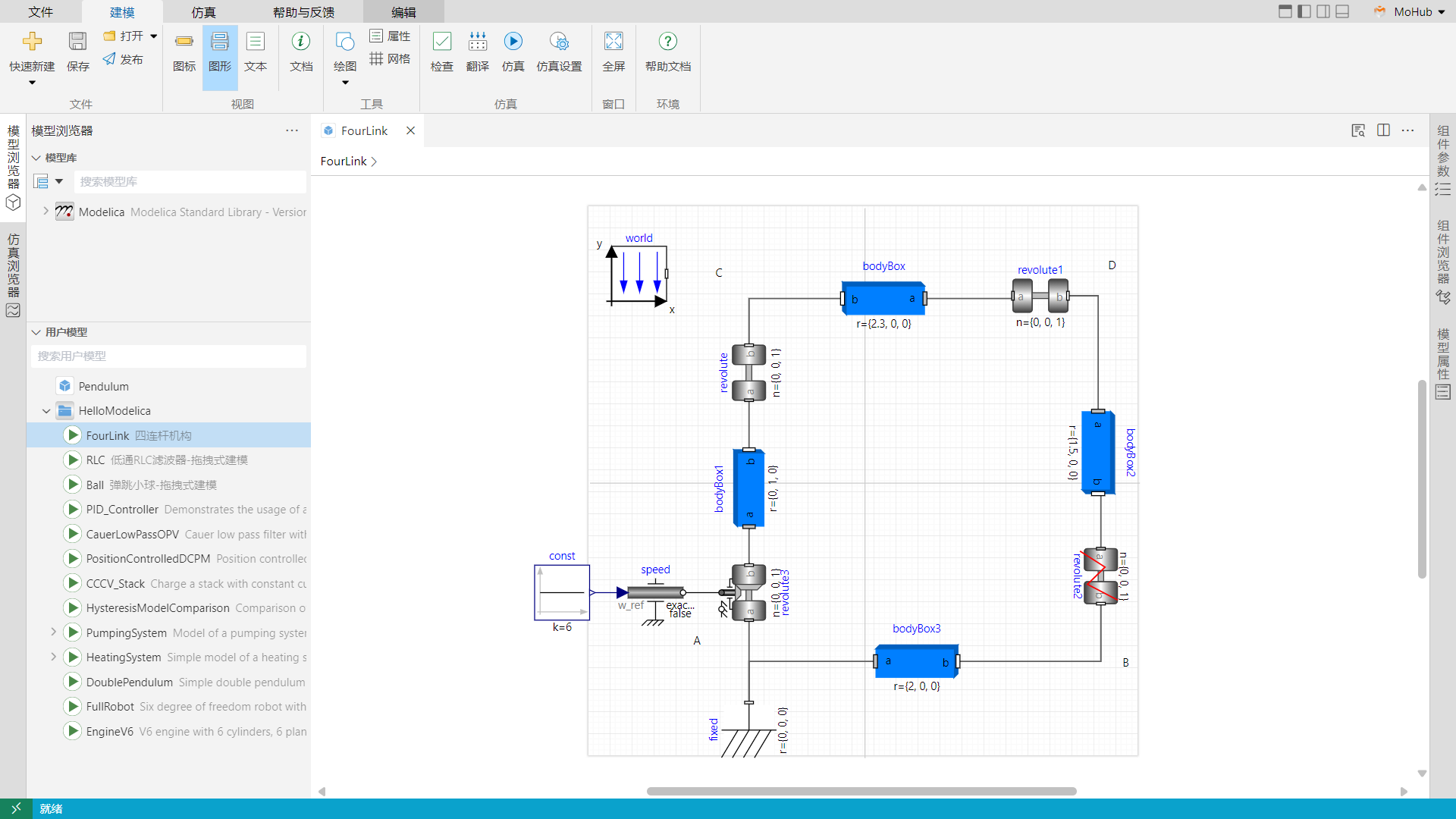
FourLink模型
四连杆曲柄以恒定加速度运动,对各杆长度进行参数注入,通过仿真求解四连杆连接节点的受力情况和位移变化。并且可以通过动画显示窗口观察四连杆机构的运动状况。值得注意的是,对于四联杆机构中的转动副容易出现多解情况,因此可以根据首次计算结果观察出现多解的转动副,通过分析对转动副参数中的stateSelect进行设置,以固定状态求得唯一解。
Modelica在机械领域建模实例,可通过三维动画对对象运动状态进行展示。