
# PositionControlledDCPM(DCPM系统(位置控制))
本案例使用拖拽式建模在MWORKS.MoHub平台搭建H桥电源的位置控制的DCPM驱动系统。
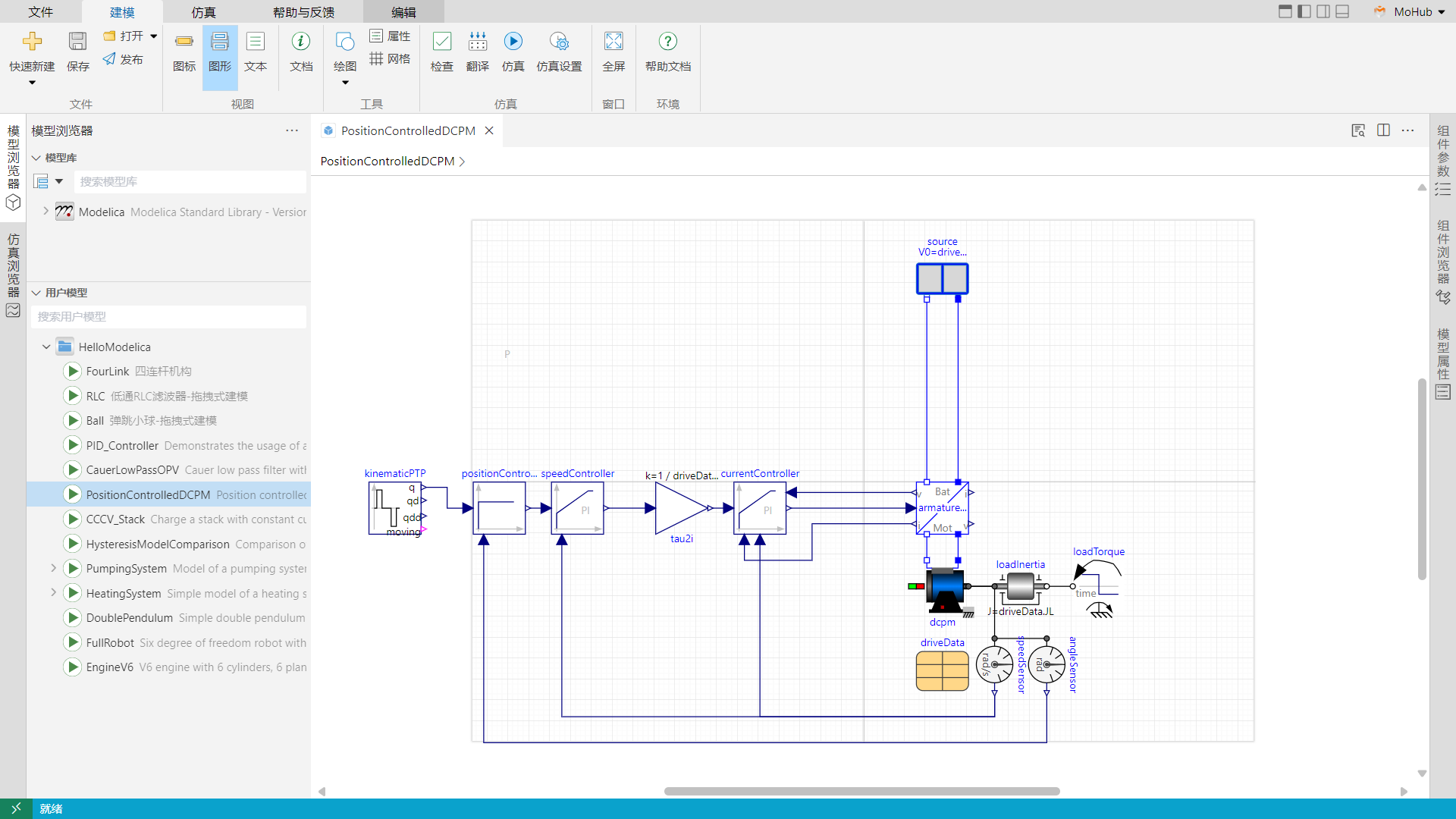
PositionControlledDCPM模型
该模型演示了如何通过位移控制器控制速度驱动的DCPM驱动系统。内部电流控制器根据绝对最优值进行参数化。中间控制回路根据对称最优参数化的速度控制器构成。外部控制回路由位移控制器形成,该控制器被参数化以避免位置超调。在时间=0.2s时,PTP开始根据参考位移以限制速度和限制加速度运动。在time=2.3s时,施加负载转矩阶跃,使控制器稍微离开终端位置,直到位移控制器将驱动系统控制到指定位置。
Modelica搭建电机系统,分层建模,模型直观。